the China National Science and Technology Major Project. 2017ZX05005-005
Abstract
To solve the problem of borehole trajectory uncertainty, some methods such as error ellipsoid posture characterization, sectional error ellipse solution and error elliptic cylinder construction were proposed and an application example was given. According to the definition of inclination, azimuth and tool-face angle, a characterization method of error ellipsoid posture of borehole trajectory was presented. By intercepting the error ellipsoid with an arbitrary plane in space, the general concept and algorithm of sectional error ellipse were established to analyze the borehole trajectory errors in horizontal plane, plumb plane, normal plane, etc. Based on the theory of surface tangency and curve projection, a construction method of error elliptic cylinder of borehole trajectory was put forward to evaluate the axial enveloping error of borehole trajectory and its variation along well depth. The research shows that the deeper the well, the greater the borehole trajectory error will be. In deep and ultra-deep wells measured using conventional measurement while drilling (MWD), the borehole trajectory position error reaches tens of meters. The research results provide a complete set of analysis methods for borehole trajectory error, which can evaluate the accuracy and reliability of borehole trajectory monitoring.
LIU Xiushan. Borehole trajectory uncertainty and its characterization. [J], 2019, 46(2): 407-412 doi:10.1016/S1876-3804(19)60021-2
Introduction
The basic objective of borehole trajectory design, monitoring and control is to position the spatial location of borehole trajectory. However, borehole trajectory positioning is impossible to be absolutely accurate because of the errors in measurement and calculation. The accuracy of borehole trajectory positioning can be improved by means of error correction, but the error cannot be completely eliminated, so the borehole trajectory has uncertainty. In the development of oil and gas fields with dense well pattern and thin oil layers and drilling operations of offshore platforms and relief wells in particular, it is more crucial to quantitatively characterize the uncertainty of borehole trajectory, so as to reduce the risk of drilling operations and improve the effect of oil and gas field development[1].
In order to standardize the evaluation method of borehole trajectory uncertainty, the Society of Petroleum Engineers (SPE) set up the Industry Steering Committee for Wellbore Survey Accuracy (ISCWSA), established ISCWSA model of borehole trajectory error, and updated and maintained the error source and error model at any time[2,3,4,5,6,7,8,9,10]. Compared with Wolff and De Wardt, SESTEM models[10,11], ISCWSA model is recognized as an international industry standard.
Based on the error model of borehole trajectory, the covariance matrix at each survey point can be obtained to describe the position uncertainty of borehole trajectory in space, but ISCWSA does not provide the characterization method of error ellipsoid posture of borehole trajectory. Although the included angle between the principal axes of error ellipsoid and the coordinate axes of reference system can be used to characterize the spatial posture of error ellipsoid[12], it is not in line with industry usage and not convenient to use. In addition, there are other research results including by using a plane to intercept the error ellipsoid to analyze the borehole trajectory error on horizontal plane[13,14].
In order to satisfy various engineering requirements related to error analysis of borehole trajectory, the methods of posture characterization of error ellipsoid, sectional error ellipse solution and error elliptic cylinder construction are presented in this paper which can be used to analyze the borehole trajectory errors in any plane, the axial enveloping error and its variation along measured depth, and have clear physical and engineering significance.
1. Error propagation and integration model
Error source is the basic element of error analysis of borehole trajectory, and ISCWSA has identified more than 80 error sources[10]. The common error sources include sensor error, axial and circumferential magnetic interference of BHA (bottom hole assembly), misalignment error caused by BHA sag and radial misalignment of tool subassembly, geomagnetic field uncertainty, and measured depth error, etc. The borehole trajectory error model mainly takes into account the representative uncertainty factors, and does not include accidental events, inclinometer defects and mistake errors such as incorrect data input. The assumptions of ISCWSA model are as follows[2,3,4,5,6,7,8,9,10]: (1) Borehole trajectory position uncertainty are caused exclusively by measurement errors at survey stations. (2) A survey station is modeled by measured depth, inclination and azimuth. (3) Errors from different error sources are statistically independent. (4) There is a linear relationship between the error magnitude of each measurement and the corresponding change in borehole trajectory position. (5) The combined effect on borehole trajectory position of different measurement errors is equal to the vector sum of their individual effects.
To characterize the influence law of error source on position error of borehole trajectory, Brooks and Wilson established the error propagation equation[2,3,4,5]:
To characterize the error correlation between different survey stations, different measurements, different wells and the whole cumulative effect, ISCWSA divides the error propagation mode into random error, systematic error, well error and global error, and defines the corresponding correlation coefficients. Therefore, the cumulative error result at any survey station K can be expressed as:
ISCWSA provided the calculation method of covariance matrix under different error propagation modes[2,3,4,5,6,7,8,9,10], so the 3×3 covariance matrix CK can be obtained at each survey station, in which the covariance matrix in the O-NEH wellhead coordinate system can be expressed as:
Assuming that the position error of borehole trajectory complies with the normal distribution, the equiprobability density surface of the error distribution is as follows[2,3,4,5]:
where $\delta \mathbf{r}={{\left[ \begin{matrix} \delta N, & \delta E, & \delta H \\\end{matrix} \right]}^{T}}$
This is an ellipsoid family with regard to scaling factor k, an ellipsoid will be obtained at a given value of k. Since the covariance matrix CNEH is a real symmetric matrix, there is an orthogonal matrix H to make it diagonalize. The matrix H is composed of the eigenvectors of CNEH, and can be obtained by assembling the three eigenvectors in columns:
After obtaining the eigenvalue and eigenvector of CNEH, the standard ellipsoid equation can be obtained in the principal axis coordinate system O°-UVW of the error ellipsoid:
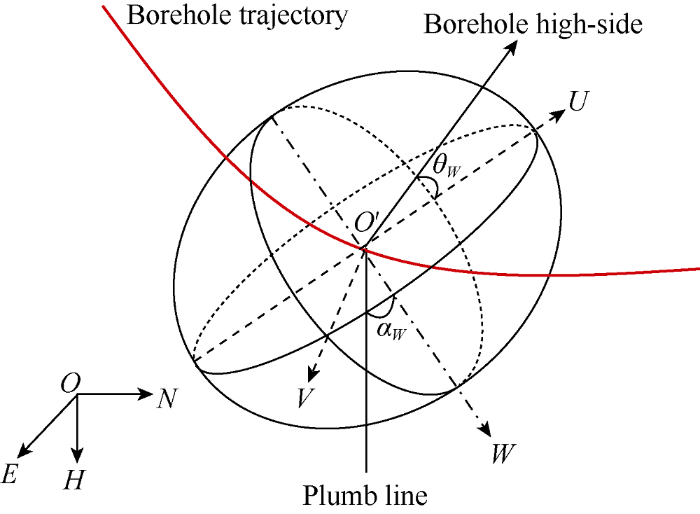
As shown in Fig. 1, according to the definition of inclination, azimuth and tool-face angle, the inclination αW and azimuth ϕW of the principal axis W of the error ellipsoid and the rotation angle θW around the principal axis W are selected to represent the posture of error ellipsoid, the equation is as follows:
Fig. 1.
Error ellipsoid and posture characterization.
In practice, it is often necessary to find out the correspondence between the eigenvalues and eigenvectors with the principal axes of ellipsoid. In general, the principal axis close to the borehole high-side is used as the U-axis, the principal axis close to the vertical direction is used as the W-axis, and the V-axis is determined according to the right hand rule, so the U-axis, V-axis and W-axis constitute the right-handed coordinate system.
3. Sectional error ellipse
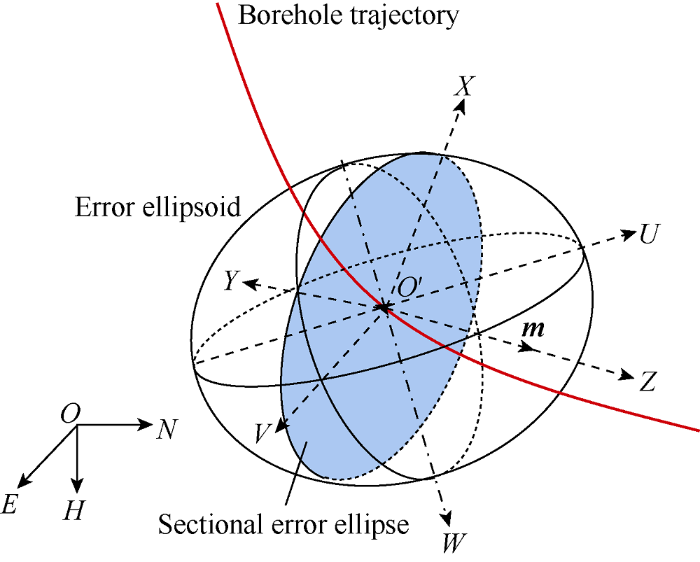
In the process of drilling, it is often necessary to analyze the errors of borehole trajectory in horizontal plane, vertical plane, normal plane or even arbitrary plane, to evaluate the uncertainty of borehole trajectory. Therefore, a sectional error ellipse can be obtained through intercepting the error ellipsoid by using the plane crossing the ellipsoid center (Fig. 2).
Fig. 2.
Error ellipsoid and sectional error ellipse.
In order to establish the universal representation and calculation method of sectional error ellipse, the unit vector m is used to represent the normal direction of any posture plane, then the inclination αm and azimuth ϕm of the normal line will define the spatial posture of the plane. As shown in Fig. 2, the cross-section coordinate system O´-XYZ is established with the center of the error ellipsoid as the origin, where the Z-axis points to the normal direction of the plane, the X-axis is the intersection line between the plane and the Z-axis vertical plane and points to the high-side direction, and the Y-axis horizontally points to the right. According to the covariance matrix CNEH of equation (3) and the rotation transformation relation between the coordinate systems, the covariance matrix in the cross-section coordinate system O´-XYZ is as follows:
The plane posture usually includes horizontal plane, vertical plane and normal plane, and they intercept the error ellipsoid to get the error ellipses of horizontal section, vertical section and normal section, respectively. The following three cases are the special cases of the above general method, and the corresponding results can be obtained by selecting the appropriate inclination and azimuth of the normal line: (1) Error ellipse of horizontal section. Take αm=ϕm=0, the matrix T is the unit matrix, and the rotation angle θ starts from the north direction. (2) Error ellipse of vertical section. Take αm=90°, ϕm is the azimuth of normal direction of the vertical plane, and the rotation angle θ starts from the vertical direction. (3) Error ellipse of normal section. Take αm and ϕm as the inclination α and azimuth ϕ of borehole trajectory respectively, and the rotation angle θ starts from the direction of the borehole high side.
4. Error elliptical cylinder
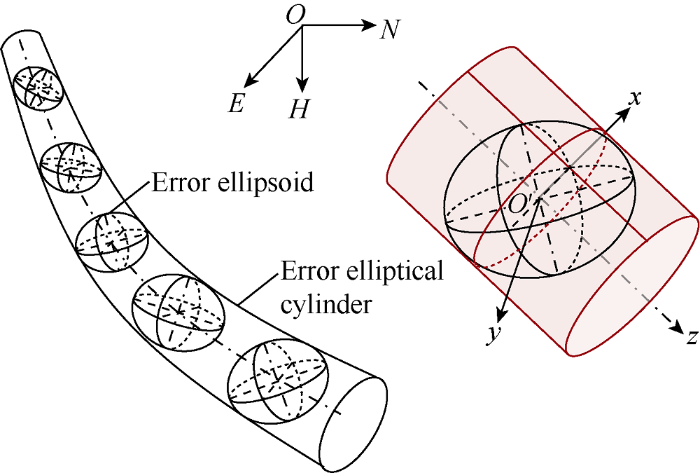
The error ellipsoids of borehole trajectory are in series on the borehole trajectory, and the centers of the error ellipsoids are at survey stations. If a curved surface is used to envelop these error ellipsoids, an error elliptical cylinder will be obtained, and the resulting elliptical cylinder can represent the axial enveloping error of borehole trajectory and its variation along the measured depth (Fig. 3).
Fig. 3.
Error elliptical cylinder and its construction principle.
However, the shape of error elliptical cylinder is very complicated. First, the wellbore trajectory (the axis of the elliptical cylinder) is a three-dimensional twisted curve, rather than a simple curve such as a straight line or circular arc. Secondly, the cross section of the elliptical cylinder is elliptic. Since the error ellipsoid size at each survey station is different, the radius of the major semi-axis and minor semi-axis of sectional ellipses vary with the measured depth. Furthermore, since each error ellipsoid has different posture, the elliptical cylinder is a twisted surface along the borehole trajectory. In fact, the error elliptical cylinder surface is an undevelopable surface, not an envelope surface in the strict sense.
In order to understand the constitutive principle of error elliptical cylinder, assuming that the formation is ice and the error ellipsoid has high temperature. When the error ellipsoid moves along the borehole trajectory, the ice body touched by the error ellipsoid will be melted. In this way, the wellbore formed in the formation is the error elliptical cylinder, and the wellbore wall is the surface of error elliptical cylinder.
As shown in Fig. 3, the surface of error elliptical cylinder is tangent to the error ellipsoid, and its tangent points form a closed curve. In the borehole coordinate system O°-xyz, the closed curve is projected onto the xy plane to obtain a closed projection curve. This projection curve is the boundary curve of the projection region of error ellipsoid on the xy plane, and also the boundary curve of the cross section of the error elliptical cylinder at survey station. Obviously, the boundary curve of the error elliptical cylinder's cross section is an ellipse. If the sectional ellipses of the error elliptical cylinder at every survey station can be obtained, the whole error elliptical cylinder can be determined.
Firstly, based on the rotation transformation relation of the coordinate system, the error ellipsoid equation in the borehole coordinate system O°-xyz can be obtained. If three vectors Bi (i=1, 2, 3) are used to represent the transformation matrix B between coordinate system O°-UVW and coordinate system O´-xyz, and the vector r is used to represent the position error coordinate of the borehole trajectory(x, y, z), then the error ellipsoid equation is:
By eliminating the parameter z in the vector r, the projection curve equation of the tangent curve between elliptical cylinder surface and ellipsoid on xy plane can be obtained:
${{\left[ \begin{matrix} x \\ y \\ \end{matrix} \right]}^{T}}\left[ \begin{matrix} {{F}_{11}} & {{F}_{12}} \\ {{F}_{21}} & {{F}_{22}} \\ \end{matrix} \right]\left[ \begin{matrix} x \\ y \\ \end{matrix} \right]=1$
where ${{F}_{11}}={{\sum\limits_{i=1}^{3}{\left( \frac{{{D}_{i1}}}{{{R}_{i}}} \right)}}^{2}}$ ${{F}_{12}}={{F}_{21}}=\sum\limits_{i=1}^{3}{\left( \frac{{{D}_{i1}}{{D}_{i2}}}{R_{i}^{2}} \right)}$
If the inverse matrix of the matrix F is represented by the matrix G, the radius of principal axes and the rotation angle of the cross section ellipse of the error elliptical cylinder are:
The ellipses of cross section at all survey stations are connected in series along the borehole trajectory to form the error elliptical cylinder, which can be used to evaluate the axial envelope error of borehole trajectory and its variation along the measured depth.
5. Case analysis
A horizontal well was surveyed and calculated according to the industry norms, and the calculation results with the true north as the reference direction are shown in Table 1. The well had a geomagnetic field intensity of 56 356.51 nT, magnetic declination of -10.60°, magnetic dip of 64.72°, meridian convergence of 0.876°, and the scaling factor of error ellipsoid of 2.0. The basic MWD error model with non-axial correction and BHA sag was used. According to the characterization and calculation methods of borehole trajectory error in this paper, the evaluation results were shown in Tables 2 and 3 (due to space limitation, only part of the data is listed in Tables 1-3).
Table 1
Table 1The calculation results of borehole trajectory.
The deeper the well, the greater the trajectory error will be. The position error of borehole trajectory in deep and ultra- deep wells can reach tens of meters. In order to improve the monitoring and control accuracy of borehole trajectory, the well survey operation should be in strict accordance with the industry norms, including regular and rigorous calibration of survey tools, in-field checks of geomagnetic field and gravitational field, and the use of survey interval and non-magnetic spacing for MWD surveys according to industry norms.
The principal axes of error ellipsoid of borehole trajectory does not coincide with the coordinate axes of borehole coordinate system. The spatial posture of the error ellipsoid is characterized by the inclination, azimuth and rotation angle of the principal axis of error ellipsoid, which has definite physical significance and is convenient for engineering application.
The concept and algorithm of sectional error ellipse of borehole trajectory have universality, and can be used to evaluate the errors of borehole trajectory on horizontal plane, vertical plane, normal plane and even arbitrary plane, and to analyze target-hitting probability etc.
The error elliptical cylinder of borehole trajectory can evaluate the axial envelope error of borehole trajectory and its variation along measured depth. The maximum principal axis radius of the cross-section ellipse of the error elliptical cylinder is greater than or equal to the maximum principal axis radius of the error ellipse of the normal cross-section, and even may be greater than the maximum principal axis radius of the error ellipsoid.
Nomenclature
A, B, H, F, T—coordinate transformation matrix;
C—covariance matrix;
E—east coordinate, m;
e—the error vector of borehole trajectory with respect to N, E, and H coordinates;
Glob—global error;
G—the inverse matrix of the matrix F;
H—true vertical depth, m;
h—number of error sources;
k—scaling factor of error ellipse, dimensionless;
L—measured depth, m;
m—normal vector;
N—north coordinate, m;
Rand—random error;
R—principal axis radius of error ellipsoid, m;
r—principal axis radius of error ellipse, m;
r—position error vector of borehole trajectory;
Syst—systemic error;
U, V, W—coordinates of principal axes of error ellipsoid;
Well—well error;
X—high side coordinate of sectional coordinate system, m;
x—high side coordinate of borehole trajectory, m;
Y—right coordinate of sectional coordinate system, m;
y—right coordinate of borehole trajectory, m;
Z—normal coordinate of sectional coordinate system, m;
z—tangential coordinate of borehole trajectory, m;
α—inclination angle, (°);
ε—error source;
ϕ—azimuth angle, (°);
λ—eigenvalue of covariance matrix, m2;
θ—rotation angle of error ellipsoid or ellipse, (°);
σ—error magnitude, or variance and covariance, m2;
$\frac{\partial \mathbf{p}}{\partial \varepsilon }$ —weighting function vector;
$\frac{d\mathbf{r}}{d\mathbf{p}}$—effect matrix of the survey errors on the borehole position in the N-axis, E-axis, and H-axis.
Gas kick during carbonate reservoirs drilling and its risk assessment
1
2017
... The basic objective of borehole trajectory design, monitoring and control is to position the spatial location of borehole trajectory. However, borehole trajectory positioning is impossible to be absolutely accurate because of the errors in measurement and calculation. The accuracy of borehole trajectory positioning can be improved by means of error correction, but the error cannot be completely eliminated, so the borehole trajectory has uncertainty. In the development of oil and gas fields with dense well pattern and thin oil layers and drilling operations of offshore platforms and relief wells in particular, it is more crucial to quantitatively characterize the uncertainty of borehole trajectory, so as to reduce the risk of drilling operations and improve the effect of oil and gas field development[1]. ...
An improved method for computing wellbore position uncertainty and its application to collision and target intersection probability analysis
5
1996
... In order to standardize the evaluation method of borehole trajectory uncertainty, the Society of Petroleum Engineers (SPE) set up the Industry Steering Committee for Wellbore Survey Accuracy (ISCWSA), established ISCWSA model of borehole trajectory error, and updated and maintained the error source and error model at any time[2,3,4,5,6,7,8,9,10]. Compared with Wolff and De Wardt, SESTEM models[10,11], ISCWSA model is recognized as an international industry standard. ...
... Error source is the basic element of error analysis of borehole trajectory, and ISCWSA has identified more than 80 error sources[10]. The common error sources include sensor error, axial and circumferential magnetic interference of BHA (bottom hole assembly), misalignment error caused by BHA sag and radial misalignment of tool subassembly, geomagnetic field uncertainty, and measured depth error, etc. The borehole trajectory error model mainly takes into account the representative uncertainty factors, and does not include accidental events, inclinometer defects and mistake errors such as incorrect data input. The assumptions of ISCWSA model are as follows[2,3,4,5,6,7,8,9,10]: (1) Borehole trajectory position uncertainty are caused exclusively by measurement errors at survey stations. (2) A survey station is modeled by measured depth, inclination and azimuth. (3) Errors from different error sources are statistically independent. (4) There is a linear relationship between the error magnitude of each measurement and the corresponding change in borehole trajectory position. (5) The combined effect on borehole trajectory position of different measurement errors is equal to the vector sum of their individual effects. ...
... To characterize the influence law of error source on position error of borehole trajectory, Brooks and Wilson established the error propagation equation[2,3,4,5]: ...
... ISCWSA provided the calculation method of covariance matrix under different error propagation modes[2,3,4,5,6,7,8,9,10], so the 3×3 covariance matrix CK can be obtained at each survey station, in which the covariance matrix in the O-NEH wellhead coordinate system can be expressed as: ...
... Assuming that the position error of borehole trajectory complies with the normal distribution, the equiprobability density surface of the error distribution is as follows[2,3,4,5]: ...
Accuracy prediction for directional MWD
5
1999
... In order to standardize the evaluation method of borehole trajectory uncertainty, the Society of Petroleum Engineers (SPE) set up the Industry Steering Committee for Wellbore Survey Accuracy (ISCWSA), established ISCWSA model of borehole trajectory error, and updated and maintained the error source and error model at any time[2,3,4,5,6,7,8,9,10]. Compared with Wolff and De Wardt, SESTEM models[10,11], ISCWSA model is recognized as an international industry standard. ...
... Error source is the basic element of error analysis of borehole trajectory, and ISCWSA has identified more than 80 error sources[10]. The common error sources include sensor error, axial and circumferential magnetic interference of BHA (bottom hole assembly), misalignment error caused by BHA sag and radial misalignment of tool subassembly, geomagnetic field uncertainty, and measured depth error, etc. The borehole trajectory error model mainly takes into account the representative uncertainty factors, and does not include accidental events, inclinometer defects and mistake errors such as incorrect data input. The assumptions of ISCWSA model are as follows[2,3,4,5,6,7,8,9,10]: (1) Borehole trajectory position uncertainty are caused exclusively by measurement errors at survey stations. (2) A survey station is modeled by measured depth, inclination and azimuth. (3) Errors from different error sources are statistically independent. (4) There is a linear relationship between the error magnitude of each measurement and the corresponding change in borehole trajectory position. (5) The combined effect on borehole trajectory position of different measurement errors is equal to the vector sum of their individual effects. ...
... To characterize the influence law of error source on position error of borehole trajectory, Brooks and Wilson established the error propagation equation[2,3,4,5]: ...
... ISCWSA provided the calculation method of covariance matrix under different error propagation modes[2,3,4,5,6,7,8,9,10], so the 3×3 covariance matrix CK can be obtained at each survey station, in which the covariance matrix in the O-NEH wellhead coordinate system can be expressed as: ...
... Assuming that the position error of borehole trajectory complies with the normal distribution, the equiprobability density surface of the error distribution is as follows[2,3,4,5]: ...
Accuracy prediction for directional measurement while drilling
5
2000
... In order to standardize the evaluation method of borehole trajectory uncertainty, the Society of Petroleum Engineers (SPE) set up the Industry Steering Committee for Wellbore Survey Accuracy (ISCWSA), established ISCWSA model of borehole trajectory error, and updated and maintained the error source and error model at any time[2,3,4,5,6,7,8,9,10]. Compared with Wolff and De Wardt, SESTEM models[10,11], ISCWSA model is recognized as an international industry standard. ...
... Error source is the basic element of error analysis of borehole trajectory, and ISCWSA has identified more than 80 error sources[10]. The common error sources include sensor error, axial and circumferential magnetic interference of BHA (bottom hole assembly), misalignment error caused by BHA sag and radial misalignment of tool subassembly, geomagnetic field uncertainty, and measured depth error, etc. The borehole trajectory error model mainly takes into account the representative uncertainty factors, and does not include accidental events, inclinometer defects and mistake errors such as incorrect data input. The assumptions of ISCWSA model are as follows[2,3,4,5,6,7,8,9,10]: (1) Borehole trajectory position uncertainty are caused exclusively by measurement errors at survey stations. (2) A survey station is modeled by measured depth, inclination and azimuth. (3) Errors from different error sources are statistically independent. (4) There is a linear relationship between the error magnitude of each measurement and the corresponding change in borehole trajectory position. (5) The combined effect on borehole trajectory position of different measurement errors is equal to the vector sum of their individual effects. ...
... To characterize the influence law of error source on position error of borehole trajectory, Brooks and Wilson established the error propagation equation[2,3,4,5]: ...
... ISCWSA provided the calculation method of covariance matrix under different error propagation modes[2,3,4,5,6,7,8,9,10], so the 3×3 covariance matrix CK can be obtained at each survey station, in which the covariance matrix in the O-NEH wellhead coordinate system can be expressed as: ...
... Assuming that the position error of borehole trajectory complies with the normal distribution, the equiprobability density surface of the error distribution is as follows[2,3,4,5]: ...
Quantification of depth accuracy
5
2005
... In order to standardize the evaluation method of borehole trajectory uncertainty, the Society of Petroleum Engineers (SPE) set up the Industry Steering Committee for Wellbore Survey Accuracy (ISCWSA), established ISCWSA model of borehole trajectory error, and updated and maintained the error source and error model at any time[2,3,4,5,6,7,8,9,10]. Compared with Wolff and De Wardt, SESTEM models[10,11], ISCWSA model is recognized as an international industry standard. ...
... Error source is the basic element of error analysis of borehole trajectory, and ISCWSA has identified more than 80 error sources[10]. The common error sources include sensor error, axial and circumferential magnetic interference of BHA (bottom hole assembly), misalignment error caused by BHA sag and radial misalignment of tool subassembly, geomagnetic field uncertainty, and measured depth error, etc. The borehole trajectory error model mainly takes into account the representative uncertainty factors, and does not include accidental events, inclinometer defects and mistake errors such as incorrect data input. The assumptions of ISCWSA model are as follows[2,3,4,5,6,7,8,9,10]: (1) Borehole trajectory position uncertainty are caused exclusively by measurement errors at survey stations. (2) A survey station is modeled by measured depth, inclination and azimuth. (3) Errors from different error sources are statistically independent. (4) There is a linear relationship between the error magnitude of each measurement and the corresponding change in borehole trajectory position. (5) The combined effect on borehole trajectory position of different measurement errors is equal to the vector sum of their individual effects. ...
... To characterize the influence law of error source on position error of borehole trajectory, Brooks and Wilson established the error propagation equation[2,3,4,5]: ...
... ISCWSA provided the calculation method of covariance matrix under different error propagation modes[2,3,4,5,6,7,8,9,10], so the 3×3 covariance matrix CK can be obtained at each survey station, in which the covariance matrix in the O-NEH wellhead coordinate system can be expressed as: ...
... Assuming that the position error of borehole trajectory complies with the normal distribution, the equiprobability density surface of the error distribution is as follows[2,3,4,5]: ...
OWSG standard survey tool error model set for improved quality and implementation in directional survey management
3
2016
... In order to standardize the evaluation method of borehole trajectory uncertainty, the Society of Petroleum Engineers (SPE) set up the Industry Steering Committee for Wellbore Survey Accuracy (ISCWSA), established ISCWSA model of borehole trajectory error, and updated and maintained the error source and error model at any time[2,3,4,5,6,7,8,9,10]. Compared with Wolff and De Wardt, SESTEM models[10,11], ISCWSA model is recognized as an international industry standard. ...
... Error source is the basic element of error analysis of borehole trajectory, and ISCWSA has identified more than 80 error sources[10]. The common error sources include sensor error, axial and circumferential magnetic interference of BHA (bottom hole assembly), misalignment error caused by BHA sag and radial misalignment of tool subassembly, geomagnetic field uncertainty, and measured depth error, etc. The borehole trajectory error model mainly takes into account the representative uncertainty factors, and does not include accidental events, inclinometer defects and mistake errors such as incorrect data input. The assumptions of ISCWSA model are as follows[2,3,4,5,6,7,8,9,10]: (1) Borehole trajectory position uncertainty are caused exclusively by measurement errors at survey stations. (2) A survey station is modeled by measured depth, inclination and azimuth. (3) Errors from different error sources are statistically independent. (4) There is a linear relationship between the error magnitude of each measurement and the corresponding change in borehole trajectory position. (5) The combined effect on borehole trajectory position of different measurement errors is equal to the vector sum of their individual effects. ...
... ISCWSA provided the calculation method of covariance matrix under different error propagation modes[2,3,4,5,6,7,8,9,10], so the 3×3 covariance matrix CK can be obtained at each survey station, in which the covariance matrix in the O-NEH wellhead coordinate system can be expressed as: ...
Prediction of wellbore position accuracy when surveyed with gyroscopic tools
3
2008
... In order to standardize the evaluation method of borehole trajectory uncertainty, the Society of Petroleum Engineers (SPE) set up the Industry Steering Committee for Wellbore Survey Accuracy (ISCWSA), established ISCWSA model of borehole trajectory error, and updated and maintained the error source and error model at any time[2,3,4,5,6,7,8,9,10]. Compared with Wolff and De Wardt, SESTEM models[10,11], ISCWSA model is recognized as an international industry standard. ...
... Error source is the basic element of error analysis of borehole trajectory, and ISCWSA has identified more than 80 error sources[10]. The common error sources include sensor error, axial and circumferential magnetic interference of BHA (bottom hole assembly), misalignment error caused by BHA sag and radial misalignment of tool subassembly, geomagnetic field uncertainty, and measured depth error, etc. The borehole trajectory error model mainly takes into account the representative uncertainty factors, and does not include accidental events, inclinometer defects and mistake errors such as incorrect data input. The assumptions of ISCWSA model are as follows[2,3,4,5,6,7,8,9,10]: (1) Borehole trajectory position uncertainty are caused exclusively by measurement errors at survey stations. (2) A survey station is modeled by measured depth, inclination and azimuth. (3) Errors from different error sources are statistically independent. (4) There is a linear relationship between the error magnitude of each measurement and the corresponding change in borehole trajectory position. (5) The combined effect on borehole trajectory position of different measurement errors is equal to the vector sum of their individual effects. ...
... ISCWSA provided the calculation method of covariance matrix under different error propagation modes[2,3,4,5,6,7,8,9,10], so the 3×3 covariance matrix CK can be obtained at each survey station, in which the covariance matrix in the O-NEH wellhead coordinate system can be expressed as: ...
The reliability problem related to directional survey data
3
2006
... In order to standardize the evaluation method of borehole trajectory uncertainty, the Society of Petroleum Engineers (SPE) set up the Industry Steering Committee for Wellbore Survey Accuracy (ISCWSA), established ISCWSA model of borehole trajectory error, and updated and maintained the error source and error model at any time[2,3,4,5,6,7,8,9,10]. Compared with Wolff and De Wardt, SESTEM models[10,11], ISCWSA model is recognized as an international industry standard. ...
... Error source is the basic element of error analysis of borehole trajectory, and ISCWSA has identified more than 80 error sources[10]. The common error sources include sensor error, axial and circumferential magnetic interference of BHA (bottom hole assembly), misalignment error caused by BHA sag and radial misalignment of tool subassembly, geomagnetic field uncertainty, and measured depth error, etc. The borehole trajectory error model mainly takes into account the representative uncertainty factors, and does not include accidental events, inclinometer defects and mistake errors such as incorrect data input. The assumptions of ISCWSA model are as follows[2,3,4,5,6,7,8,9,10]: (1) Borehole trajectory position uncertainty are caused exclusively by measurement errors at survey stations. (2) A survey station is modeled by measured depth, inclination and azimuth. (3) Errors from different error sources are statistically independent. (4) There is a linear relationship between the error magnitude of each measurement and the corresponding change in borehole trajectory position. (5) The combined effect on borehole trajectory position of different measurement errors is equal to the vector sum of their individual effects. ...
... ISCWSA provided the calculation method of covariance matrix under different error propagation modes[2,3,4,5,6,7,8,9,10], so the 3×3 covariance matrix CK can be obtained at each survey station, in which the covariance matrix in the O-NEH wellhead coordinate system can be expressed as: ...
High integrity wellbore surveys: Methods for eliminating gross errors
3
2007
... In order to standardize the evaluation method of borehole trajectory uncertainty, the Society of Petroleum Engineers (SPE) set up the Industry Steering Committee for Wellbore Survey Accuracy (ISCWSA), established ISCWSA model of borehole trajectory error, and updated and maintained the error source and error model at any time[2,3,4,5,6,7,8,9,10]. Compared with Wolff and De Wardt, SESTEM models[10,11], ISCWSA model is recognized as an international industry standard. ...
... Error source is the basic element of error analysis of borehole trajectory, and ISCWSA has identified more than 80 error sources[10]. The common error sources include sensor error, axial and circumferential magnetic interference of BHA (bottom hole assembly), misalignment error caused by BHA sag and radial misalignment of tool subassembly, geomagnetic field uncertainty, and measured depth error, etc. The borehole trajectory error model mainly takes into account the representative uncertainty factors, and does not include accidental events, inclinometer defects and mistake errors such as incorrect data input. The assumptions of ISCWSA model are as follows[2,3,4,5,6,7,8,9,10]: (1) Borehole trajectory position uncertainty are caused exclusively by measurement errors at survey stations. (2) A survey station is modeled by measured depth, inclination and azimuth. (3) Errors from different error sources are statistically independent. (4) There is a linear relationship between the error magnitude of each measurement and the corresponding change in borehole trajectory position. (5) The combined effect on borehole trajectory position of different measurement errors is equal to the vector sum of their individual effects. ...
... ISCWSA provided the calculation method of covariance matrix under different error propagation modes[2,3,4,5,6,7,8,9,10], so the 3×3 covariance matrix CK can be obtained at each survey station, in which the covariance matrix in the O-NEH wellhead coordinate system can be expressed as: ...
Introduction to wellbore positioning
5
2017
... In order to standardize the evaluation method of borehole trajectory uncertainty, the Society of Petroleum Engineers (SPE) set up the Industry Steering Committee for Wellbore Survey Accuracy (ISCWSA), established ISCWSA model of borehole trajectory error, and updated and maintained the error source and error model at any time[2,3,4,5,6,7,8,9,10]. Compared with Wolff and De Wardt, SESTEM models[10,11], ISCWSA model is recognized as an international industry standard. ...
... [10,11], ISCWSA model is recognized as an international industry standard. ...
... Error source is the basic element of error analysis of borehole trajectory, and ISCWSA has identified more than 80 error sources[10]. The common error sources include sensor error, axial and circumferential magnetic interference of BHA (bottom hole assembly), misalignment error caused by BHA sag and radial misalignment of tool subassembly, geomagnetic field uncertainty, and measured depth error, etc. The borehole trajectory error model mainly takes into account the representative uncertainty factors, and does not include accidental events, inclinometer defects and mistake errors such as incorrect data input. The assumptions of ISCWSA model are as follows[2,3,4,5,6,7,8,9,10]: (1) Borehole trajectory position uncertainty are caused exclusively by measurement errors at survey stations. (2) A survey station is modeled by measured depth, inclination and azimuth. (3) Errors from different error sources are statistically independent. (4) There is a linear relationship between the error magnitude of each measurement and the corresponding change in borehole trajectory position. (5) The combined effect on borehole trajectory position of different measurement errors is equal to the vector sum of their individual effects. ...
... ,10]: (1) Borehole trajectory position uncertainty are caused exclusively by measurement errors at survey stations. (2) A survey station is modeled by measured depth, inclination and azimuth. (3) Errors from different error sources are statistically independent. (4) There is a linear relationship between the error magnitude of each measurement and the corresponding change in borehole trajectory position. (5) The combined effect on borehole trajectory position of different measurement errors is equal to the vector sum of their individual effects. ...
... ISCWSA provided the calculation method of covariance matrix under different error propagation modes[2,3,4,5,6,7,8,9,10], so the 3×3 covariance matrix CK can be obtained at each survey station, in which the covariance matrix in the O-NEH wellhead coordinate system can be expressed as: ...
Borehole position uncertainty-analysis of measuring methods and derivation of systematic error model
1
1981
... In order to standardize the evaluation method of borehole trajectory uncertainty, the Society of Petroleum Engineers (SPE) set up the Industry Steering Committee for Wellbore Survey Accuracy (ISCWSA), established ISCWSA model of borehole trajectory error, and updated and maintained the error source and error model at any time[2,3,4,5,6,7,8,9,10]. Compared with Wolff and De Wardt, SESTEM models[10,11], ISCWSA model is recognized as an international industry standard. ...
Directional deflection equations for steerable drilling tools and the control mechanism of wellbore trajectory
1
2017
... Based on the error model of borehole trajectory, the covariance matrix at each survey point can be obtained to describe the position uncertainty of borehole trajectory in space, but ISCWSA does not provide the characterization method of error ellipsoid posture of borehole trajectory. Although the included angle between the principal axes of error ellipsoid and the coordinate axes of reference system can be used to characterize the spatial posture of error ellipsoid[12], it is not in line with industry usage and not convenient to use. In addition, there are other research results including by using a plane to intercept the error ellipsoid to analyze the borehole trajectory error on horizontal plane[13,14]. ...
Discussion on the analytical method of well track uncertainty
1
1999
... Based on the error model of borehole trajectory, the covariance matrix at each survey point can be obtained to describe the position uncertainty of borehole trajectory in space, but ISCWSA does not provide the characterization method of error ellipsoid posture of borehole trajectory. Although the included angle between the principal axes of error ellipsoid and the coordinate axes of reference system can be used to characterize the spatial posture of error ellipsoid[12], it is not in line with industry usage and not convenient to use. In addition, there are other research results including by using a plane to intercept the error ellipsoid to analyze the borehole trajectory error on horizontal plane[13,14]. ...
Probability analysis of error ellipsoid (ellipse) and hole intersection
1
2000
... Based on the error model of borehole trajectory, the covariance matrix at each survey point can be obtained to describe the position uncertainty of borehole trajectory in space, but ISCWSA does not provide the characterization method of error ellipsoid posture of borehole trajectory. Although the included angle between the principal axes of error ellipsoid and the coordinate axes of reference system can be used to characterize the spatial posture of error ellipsoid[12], it is not in line with industry usage and not convenient to use. In addition, there are other research results including by using a plane to intercept the error ellipsoid to analyze the borehole trajectory error on horizontal plane[13,14]. ...




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}