


Introduction
China National Petroleum Corporation (CNPC) has more than 200 thousand oil wells. Because of the low formation energy, artificial lift wells account for more than 95%. Artificial lift technologies include rod pumping, PCP, electric submersible pump, hydraulic pump and gas lift etc. The sucker rod pump (rod pumping unit and ground drive PCP) is most widely used, and adopted in 92% of the wells[1].
In sucker rod pump technology, the motor drives the downhole pump by the rod, and lifts the oil to the ground. This traditional technology has three problems. The first one is low efficiency and high energy consumption with an average efficiency of 24% of the equipment[2,3,4], but consumes more than half of the total power consumed in the oilfield. The second one is the rod-tubing wearing and short pump checking period in high deviated wells, high water cut and polymer flooding wells[5]. The pump checking period in some wells of Jilin and Changqing oilfields is only about 300 d due to rod-tubing wearing, much shorter than the average pump checking period of wells with rod pumping unit of 800 d. With the increase of deviated wells, directional wells and horizontal wells, the well trajectory is getting more complex and the rod-tubing wearing is becoming more and more serious. The third one is the oil leakage caused by dynamic sealing failure of wellhead by polished rod and packing.
To solve these problems of rod pumping, rodless artificial lift technology has been developed in China and overseas. Currently, electrical submersible centrifugal pump (ESP) is a mature technology[6,7]. It is suitable for wells with daily liquid production of more than 50 m3, but a large number of wells in CNPC are low in production, limiting its application, and the number of ESP wells is only about 2000.
Electric submersible progressing cavity pump (ESPCP) technology is one of rodless artificial lift technologies emerging recent years. Compared with ESP, ESPCP technology is more suitable for heavy oil wells and sand production wells[8]. Since the 1990s, some oil companies abroad have done a lot of research on ESPCP technology, such as Centrilift Amoco, Reda and Baker Hughes of USA and KUDU of Canada. The traditional design concept is the combination of submersible motor, gear reducer, protector and PCP[9,10]. In this design, the speed of motor is 1450 r/min. The speed is reduced to 150 r/min by a planetary reduction gear with a gear ratio of 9:1. Limited by the casing size, the diameter of gear reducer must be smaller than 102 mm. The large gear ratio and small size make the key components too small to satisfy the mechanical strength and reliability requirement, and several gear reducers broke down during application.
In 2008, researchers in China and abroad began to study the electrical motor drive PCP with low speed, in which the submersible motor is the key part of the whole system. Zhang et al.[11,12,13,14] designed a sectional permanent motor. Each section of the motor is independent unit which can work separately. When one of the units fails, the other units can still work unaffectedly. However, this structure can make the motor core shorter. Wang[15] designed and analyzed a 12-grade motor with 36 slots using simulation software, but didn’t mention prototype and application results of permanent magnetic motor. Wang[16] studied data remote transmission technology. In 2016, KUDU company of Canada launched a new product with permanent magnetic motor and PCP[17], with the motor speed from 50 to 750 r/min. But there is no detailed design or field application report in China.
With the support of key science and technology projects funded by CNPC, to meet the requirement of production, the research institute of petroleum exploration and development (RIPED) of CNPC has developed submersible permanent magnetic synchronous low speed motor after 10 years of exploration and testing. The designed structure includes submersible permanent magnetic synchronous low speed motor, motor protector, flexible shaft and PCP. In the design, we left out the gear speed reducer which is most likely to fail. This structure can be used in 139.7 mm (5.5 in) casing, realizing rodless oil pumping. This technology is suitable for wells with daily output of 5 to 50 m3/d, that is to say it can satisfy production requirement of most wells of CNPC. In this paper, we will introduce the key components of the system including the submersible motor and analyze the field application results.
1. Key components
1.1. Submersible permanent magnetic synchronous low speed motor
1.1.1. Performance requirement
(1) Power requirement. The aim of this technology is to solve the artificial lift problems of low production wells with daily output ranging from 5 to 50 m3 (most oil wells of CNPC fall in this range). To satisfy the production requirement of 139.7 (5.5 inches) casing wells and ensure the motor can be run in smoothly, the maximum outer diameter of the motor is 114 mm. When working downhole, the motor must output high power at low speed to satisfy the well liquid lifting, fluid frictional loss, cable loss and ground control loss. The liquid lifting power is the function of lifting height and liquid production rate[18]. The maximum lifting height is 2 000 m and the daily liquid production is 25 m3. In this extreme case, the hydraulic horsepower is 5.6 kW. According to the research of ESP system efficiency previously, the system efficiency of ESPCP is about 30%[19,20]. Therefore, the minimum installed power of the submersible motor is 15 kW.
(2) Speed requirement. The speed range of PCP is from 50 to 150 r/min[21]. Since the submersible motor drive PCP can work without rod-tubing wearing, the running speed can be increased appropriately, and thus the speed range of motor is designed from 50 to 300 r/min.
(3) Torque output requirement. The working torque of PCP is from 50 to 300 N·m, but the starting torque is 2 times than that[22]. Because there is no speed reducer, the maximum output torque must be 600 N·m.
Considering the lifting requirement and motor characteristics, we chose permanent magnetic synchronous motor to satisfy the lifting requirements of high torque output at low speed in confined wellbore space.
1.1.2. The size
The electromagnetic process of motor is done in the air gap. The diameter and effective length of motor armature near the air gap determine the size of the motor. Considering the well production requirement and the function of motor power and size (Equation (1)), we worked out the armature diameter and length of stator first[23,24].
where A—electric load, A/m; Bδ—the maximum magnet induction intensity of motor air gap, T; Da—armature diameter, m; Kp—electric power waveform factor, dimensionless; Lef—axial length of armature, m; n—the speed of motor, r/min; P—power, W; αi—pole-arc coefficient, dimensionless.
Limited by the casing size, the maximum outer diameter of the motor is 114 mm, so the inside diameter of the stator was calculated at 60 mm from the function. The axial length of the motor armature for 15 kW motor was 5.9 m at rated speed 300 r/min. To make the motor perform better at low speed, the fractional slot structure with pole number close to slot number is adopted[25]. To guarantee the symmetry of phase winding, the number of slot must be an integer multiple of phase number. That means the slot number is an integer multiple of 3. In consideration of the constraints mentioned ahead, it is preliminarily decided to adopt the structure with 12 stator slots and 10 poles for the motor. The structure of motor is shown in Fig. 1.
Fig. 1.
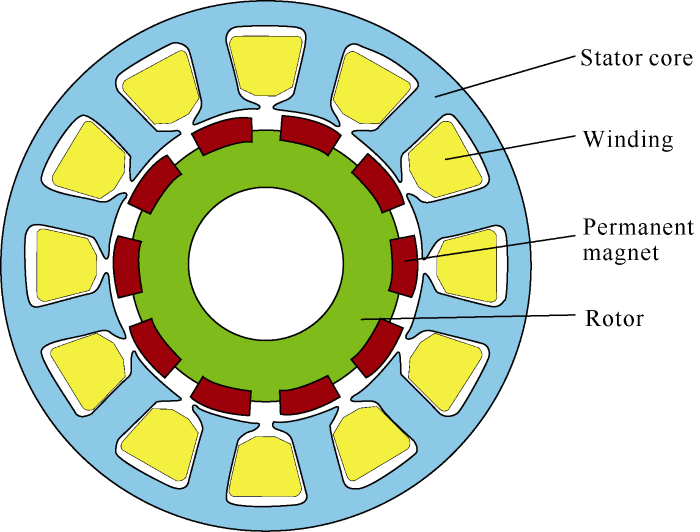
Fig. 1.
Designed structure of submersible permanent magnetic motor.
1.1.3. Numerical simulation and structural optimization
Maxwell Ansoft is a piece of professional software for electric motor design and optimization. It has been widely used in recent years. The motor uses permanent magnet exci-tation to reduce the motor size and increase the number of motor poles. But the magnetic circuit structure of permanent magnet is more complex and more difficult to design. The numerical simulation result by Maxwell Ansoft can improve the accuracy of motor design to satisfy the design requirement. Moreover, according to the working condition of lift and the characteristics of PCP, the submersible motor must satisfy the key requirements of high torque output capability and working efficiency compared with other dynamic performance requirements. Therefore, we simulated the key factors affecting the motor power and output torque, the length of air gap and magnetic induction intensity. We used the simulation results to guide the motor manufacture.
The air gap length of conventional ESP motor is 0.4 mm[27]. The permanent magnet would adsorb to the stator magnet steel when installing the motor, making the assembling difficult. The air gaps with length of 0.6, 0.8, 1.0 and 1.5 mm were simulated. The simulation results are shown in Fig. 2, which shows that with the increase of air gap size, the output torque decreases. The average output torque is 146.0 N·m when the air gap length is 0.6 mm; while the average output torque decreases to 128.6 N·m, when the air gap length is 1.5 mm. To guarantee the high output torque, the air gap should be as short as possible.
Fig. 2.

Fig. 2.
Simulation results for the effect of air gap length on motor torque.
As the calculation results mentioned above, the motor of 15 kW will have a core of length at 5.9 m, but the outer diameter of no more than 114 mm, representing an ultra-slender structure. The difficulties in manufacture are assembling of winding and guaranteeing the coaxiality of stator and rotor. To solve the problems, we designed the sectional serious motor structure. In this design, the stator and rotor are designed as small sections with the same length. The short stator reduces the degree of winding assembling difficulty. Moreover, we designed a new assembling process to guarantee the coaxiality of stator and rotor. First, based on the inner circle of stator, there are rolling bearings at both ends of rotor to make sure the coaxiality of stator and rotor at each section. After the completion of each motor section, then assembling all the pieces into the whole motor. Because each stator section is based on its own outer circle, the connecting of neighboring two sections can guarantee the coaxiality of motor shells. In this way, this design can guarantee the coaxiality of the whole motor.
In light of the requirement of field hoisting, the length of motor should not be longer than 9.6 m (the length of a joint of tubing). That means the connection of the neighboring sections must be as short as possible. After experimenting on different section lengths, we found when the length of motor section was 0.6 m and the air gap was 0.8 mm, the assembling could go smoothly. Then we analyzed motor magnetic saturation under this condition.
If the magnetic induction intensity of the stator is too high, the motor will generate too much heat, lowering its efficiency. If the magnetic induction intensity of the stator is too low, the utilization of magnetic steel will not be enough, negatively affecting the torque performance of the motor. The magnetic saturation induction intensity of stator silicon steel used in this permanent magnet synchronous motor is about 1.9 T[28]. Fig. 3 is the analysis of magnetic induction intensity of the stator at air gap length of 0.8 mm. It can be seen that the magnetic induction intensity of the core teeth part is about 1.5 T, while the cusp part is 1.8 T, indicating that the designed motor structure is reasonable, so the motor has large output torque and the core material can be fully utilized without excessive magnetic saturation. Therefore, the motor can be manufactured according to the design.
Fig. 3.
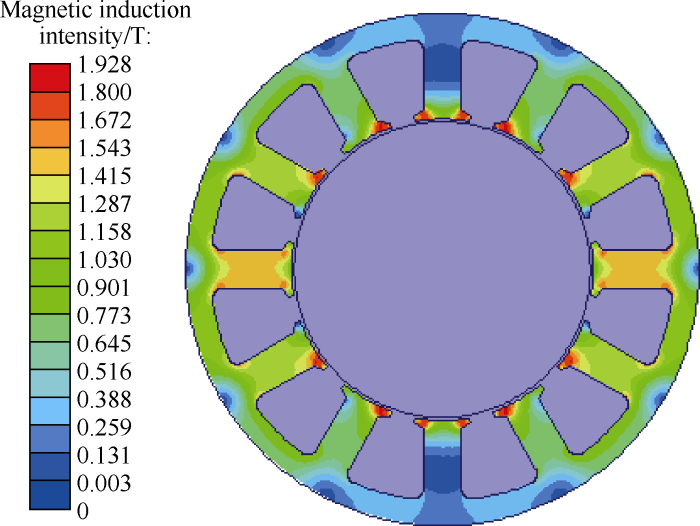
Fig. 3.
Magnetic saturation of stator core analysis result.
1.1.4. Prototype manufacture and laboratory experiments
Through combination of different numbers of sections, downhole motors with different power were produced to meet the needs of lifting under different well conditions. When the power of the motors are 7.5, 9.0, 10.5, 12.0, 13.5 and 15.0 kW, the corresponding total length of the motors are 4.5, 5.2, 6.0, 6.9, 7.8 and 8.5 m, respectively. The performance parameters of the prototype motors were tested and evaluated through laboratory experiments, and the experimental results were analyzed.
The no-load back electromotive force (back EMF) test for the motor was carried out by using the oscilloscope of FLUKE190-240. The prototype of the 12 kW motor and the test bench are shown in Fig. 4. Fig. 5 shows the back EMF curve of the motor under the no-load condition at the speed of 300 r/min. It can be seen that the motor has an effective value of three-phase back EMF of 206-208 V, a phase difference of 120°, and a peak value of back EMF of about 294 V, and can directly use the 380 V power supply in oilfield.
Fig. 4.
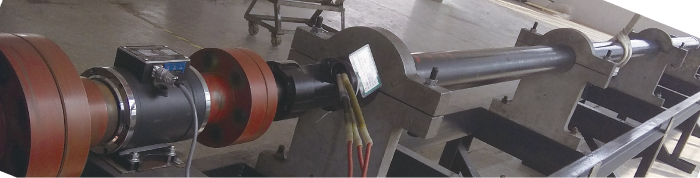
Fig. 4.
Prototype of the 12 kW motor and the test bench.
Fig. 5.
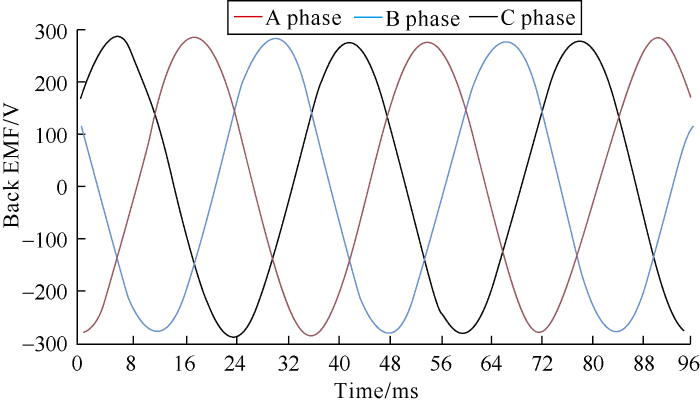
Fig. 5.
Test results of no-load back EMF of motor.
The operating efficiency of downhole PCP is related to submergence depth and oil production, and its running speed range should be wide. Therefore, the motor should have high efficiency under different load rates. The load rate of the motor is the ratio of the output power to the rated power. At the rated speed of 300 r/min, the output power of the motor was adjusted by the dynamometer within the load rate of 20%-100%. After the input power of the motor was measured, the operation efficiency of the motor was calculated. It can be seen from Fig. 6 that the six different power motors all have an operation efficiency of above 60% at the load rates of 20%-100%, which shows that the motor can meet the operating requirements of submersible PCP.
Fig. 6.
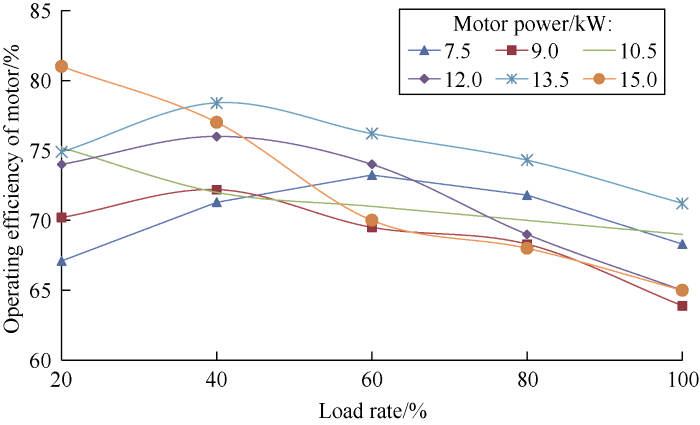
Fig. 6.
Relationship between load rate and operating efficiency of downhole motor.
Each motor is composed of multiple segments. With the increase of motor power, the number of segments, the number of mechanical connection structures, and the total length of the motor all increase. This will also lead to the increase of power loss and the decrease of motor efficiency. The efficiency of the 15 kW motor decreases rapidly with the increase of load rate, as shown in Fig. 6, because the internal mechanical connection loss of the motor increases with the increase of load, which leads to the decrease of motor efficiency. This shows that the consistency of motor segments and multi-unit assembly process need to be studied further.
Four motors with the power of 7.5, 9.0, 10.5 and 15.0 kW were selected for torque test. According to the relationship between the rated torque, rated power and rated speed, the rated torques of 7.5, 9.0, 10.5 and 15.0 kW motors are 240, 286, 335 and 478 N·m respectively at the rated speed of 300 r/min. From Fig. 7, it can be seen that the measured output torques of 7.5, 9.0, 10.5 and 15.0 kW motors are 396, 480, 580 and 670 N·m at the rated speed, measured output torque is about 1.5 times of the rated torque. It can also be seen from Fig. 7 that the speed of the motor can be adjusted in the range of 50-500 r/min. The maximum output torque of 7.5, 9.0, 10.5 and 15.0 kW motors are 510, 540, 670 and 715 N·m, respectively, at the rated speed of 300 r/min. With the increase of motor power, the maximum output torque of the motor also increases. Therefore, the most suitable motor should be selected according to the working conditions of the oil well, so that the oil production can better match with the initial investment.
Fig. 7.
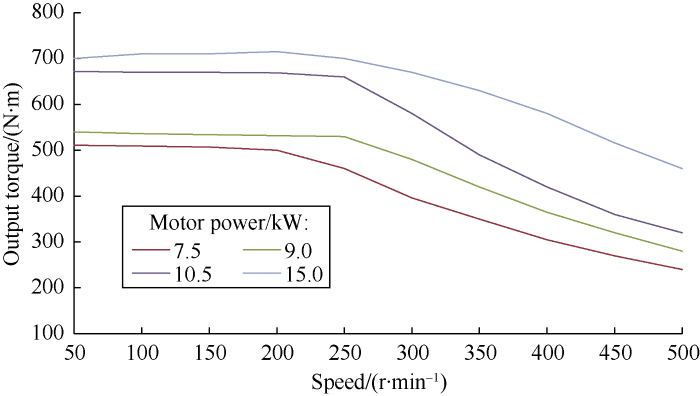
Fig. 7.
Laboratory experiment results of motor operation performance.
1.2. Other matching tools
1.2.1. Motor protector
The main function of the motor protector is to supply motor oil and keep balance of the motor pressure. Its structure is shown in Fig. 8.
Fig. 8.
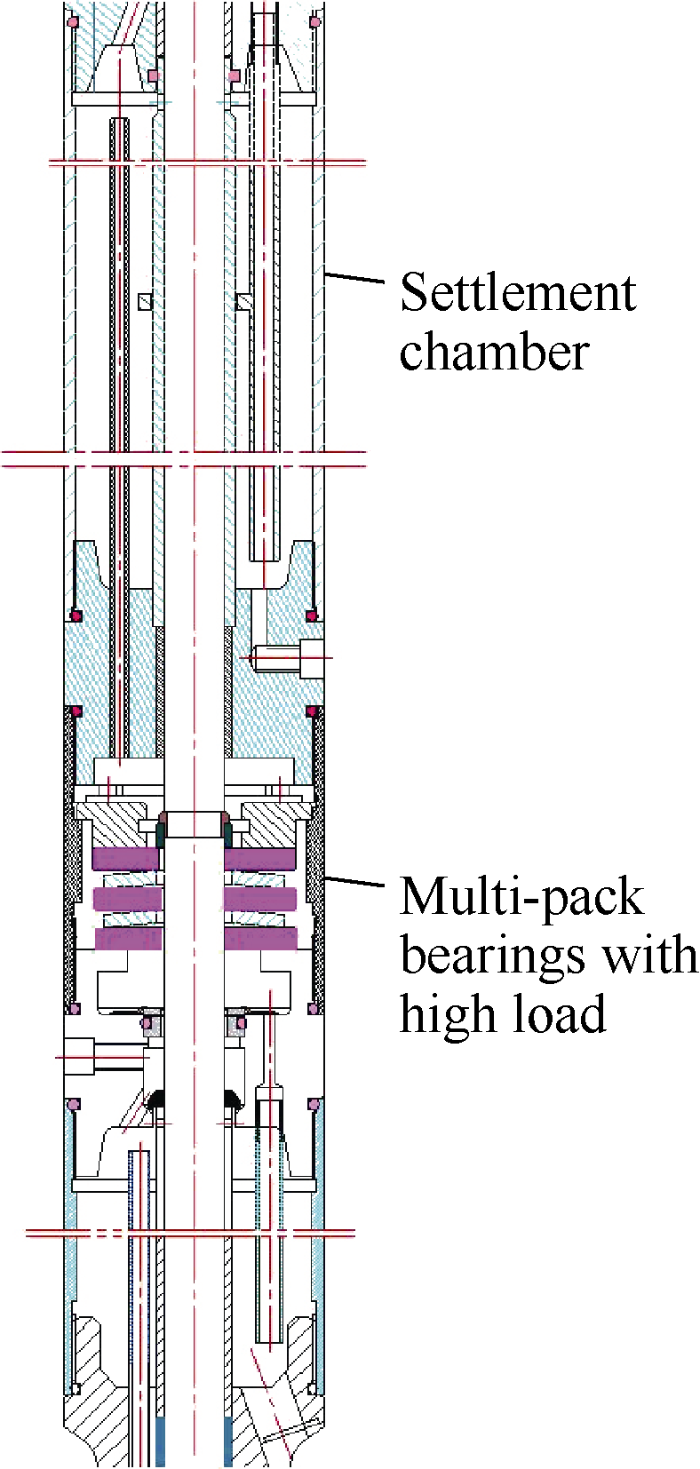
Fig. 8.
Structure of the motor protector.
Unlike the traditional ESP protector, the motor protector of the ESPCP needs to bear large axial force produced by the PCP[29,30]. The axial force is related to the rotor diameter, eccentricity and lifting pressure head of the PCP. Taking a well with daily production of 30 m3 and lifting height of 1 500 m as an example, if the PCP has a rotor diameter of 37 mm and rotor eccentricity of 6 mm, the axial force is calculated at 13 KN. In view of the problem of large axial load of PCP, a series operation structure of multi-pack bearings was designed. In laboratory experiments, the motor protector could operate stably at the axial load of 70 kN, meeting the operation requirements of PCP.
1.2.2. Flexible transmission tool
The flexible transmission tool is installed at the upper end of the motor protector and the lower end of the PCP. Its main function is to convert the planetary motion of the rotor of PCP into the concentric motion of the motor, and transfer the torque generated by the motor to the rotor of PCP. An eccentric connection structure is designed, as shown in Fig. 9, with the maximum eccentricity of 9 mm and maximum external diameter of 102 mm, which allows the underground cable to pass through. Besides transferring torque, the flexible transmission tool also can prevent sand and act as the intake of well fluid.
Fig. 9.
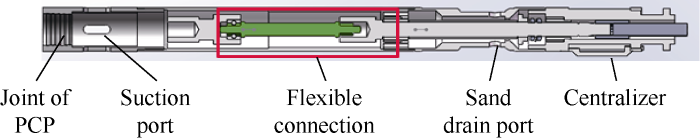
Fig. 9.
Structure of the flexible transmission tool.
1.2.3. Downhole driving PCP
The PCP is composed of the stator and rotor[31]. When the traditional ground drive mode is adopted, the speed of the PCP rotor, limited by the sucker rod[32], is generally in the range of 50-150 r/min. In order to maintain high pump efficiency, the interference between stator and rotor is large, leading to large operating torque of PCP[22] which is not matched with the torque and speed of the submersible motor, and difficulty in starting. According to the design idea of reducing the pump type and increasing the speed and increasing the gap between PCPs, the design and type selection method of PCP matching with the submersible motor has been worked out. The new PCP has lower operation torque and energy consumption in field application. Fig. 10 shows the production of Well A2, with a daily production of 40 m3 and pump setting at 1 500 m depth. On April 30, 2018, the old PCP was replaced by a new type. Under the same production conditions, the new type of PCP has an operating torque of 200 N·m, 230 N·m lower than the traditional one. At the same time, the daily power consumption of the system reduced from 439.0 kW·h to 177.6 kW·h, which indicates that the abrasion of the PCP caused by interference friction decreased.
Fig. 10.
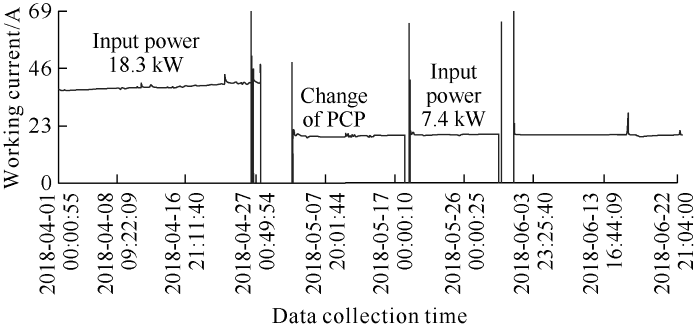
Fig. 10.
Field performance of PCPs.
2. Lifting technology of downhole direct drive PCP
Drawing on the design of ESP system, the ESPCP lifting system has two parts, the ground part and downhole part, as shown in Fig. 11. The ground part includes the control cabinet, the frequency controller, the data collector and the data remote transmitter etc. Through ground controlling, the input current and speed of the motor can be read, and the speed of the motor can be adjusted. When the pump depth is less than 1 500 m, voltage of 380 V needs to be input to the control cabinet. When the pump depth is more than 1 500 m, voltage of 660 V is needed, which is the same as that of the traditional pumping unit. The wellhead cable passing tool is also the same with traditional ESP to ensure the interchangeability of mathching tools and the convenience of field operation.
Fig. 11.
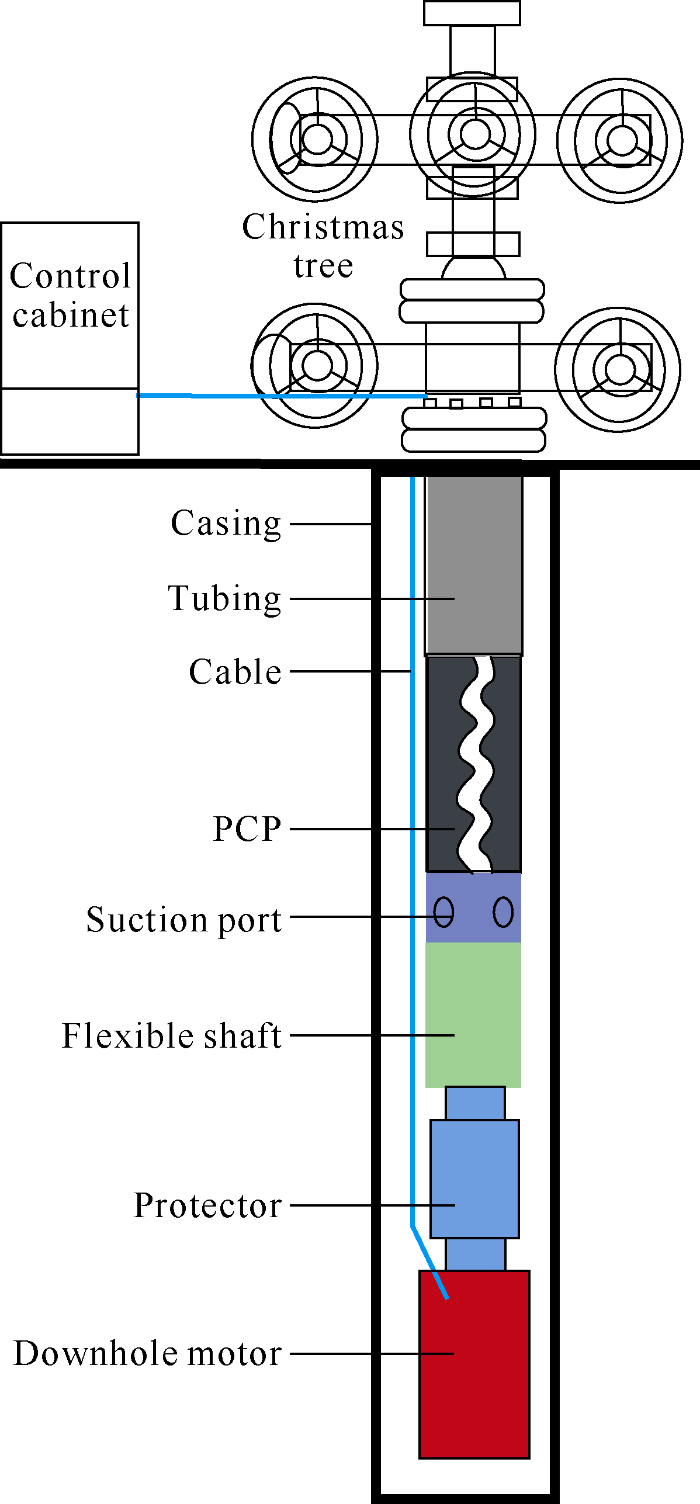
Fig. 11.
Structure of the lifting system of the downhole direct drive PCP.
The underground part includes the underground motor, protector, flexible shaft, PCP, and cable etc. In order to eliminate the influence of the flow and cable on the size and power of the motor, the cable is extended to the upper end of the motor, as shown in Fig. 11. When the system is working, the power is output from the motor shaft, and is transferred to the protector shaft, flexible shaft and PCP rotor in turn to lift the well fluid to the surface.
The field operation of ESPCP is simple. The main steps are as follows: (1) Seat the anchor on the wellhead, connect it with the lower end of the motor through ϕ73.0 mm (2.875 in) tubing threads; (2) Run the anchor into the well, while the upper end of the motor is seated on the wellhead, connect the lower end of the protector to the upper end of the motor through flanges, connect the motor and power cable, and run in continuously; (3) Connect the flexible shaft and motor protector; (4) Connect the flexible shaft and PCP; (5) Connect tubing to the designed pump setting depth, and seal cable at ground tubing hanger, and connect the power cable to the control cabinet, install wellhead and other equipment, and start operation.
The lifting system and technology of ESPCP has the following characteristics: (1) There is no risk of oil leakage because of no polished rod and other movable parts at wellhead; (2) Compared with pumping units, the ground control cabinet is smaller, lighter, and can be put in higher place, avoiding being flooded in rainy season; (3) The ESPCP adopts rodless lifting method to eliminate rod-tubing wearing thoroughly and save the cost of workover caused by rod-tubing wearing and chaging; (4) The range of speed regulation of downhole motor is wide, suitable for a wide range of oil well displacement.
3. Field application and economic benefit
3.1. Application effect
To date, ESPCP technology has been applied in more than 100 wells in Jilin, Daqing, Tuha oilfields etc. Compared with the previous pumping unit system, it can save 30% of electricity averagely, and has four advantages.
(1) It can significantly reduce installed power, save electricity and improve system efficiency. Table 1 shows a comparison of the operation parameters of ESPCP and previous pumping unit in a domestic oilfield. From the data in the table, we can see that compared with the previous pumping unit, ESPCP has a reduction of installed power of 45%, reduction of daily power consumption of 41%, system efficiency increment of 8%, and pump efficiency increment of 25%, indicating an obvious energy saving effect.
Table 1 Comparison of operating parameters of ESPCP and previous pumping unit.
| Unit | Installed power/kW | Daily liquid production/t | Daily power con- sumption/(kW·h) | Active power/kW | Reactive power/kW | Power factor | System efficiency/% | Pump efficiency/% |
|---|---|---|---|---|---|---|---|---|
| Pumping unit | 22 | 24.9 | 233.23 | 9.11 | 20.3 | 0.409 | 31.50 | 56.98 |
| ESPCP | 12 | 24.5 | 138.20 | 5.77 | 0 | 0.998 | 39.49 | 81.95 |
(2) It realizes rodless artificial lift, effectively prolonging the pump checking period of wells with serious rod-tubing wear. Influenced by irregular wellbore trajectory, rod-tubing wear was serious in some wells with pumping unit in the A oilfield. The average pump checking period was only about 200 d, resulting in frequent workover and changing rod and tube and high operation cost. Two wells in the oilfield were selected to make ESPCP test, and the pump checking period extended from 235 d to 469 d. The ESPCP technology is applied in more wells recently.
(3) Intrinsic safety of surface production equipment can be realized by using ESPCP. When conventional pumping units and ground drive PCPs are used, there are moving parts on the ground. Although every oilfield company has strengthened management, safety accidents occur every year, resulting in huge economic loss and adverse social effects. The ESPCP has no moving parts on the ground, as shown in Fig. 12, realizing the intrinsic safety of production equipment. Meanwhile, there is no wellhead oil leakage accident because there is no need to change polished rod and packing box, which is a significant advantage in swamps, wetlands and environmentally sensitive areas. Combining with the current crude oil non-spill technology of workover, the oil production and operation can be turned safe and environment-friendly.
Fig. 12.

Fig. 12.
The wellhead of ESPCP.
(4) It can be monitored and controlled remotely, improving production management efficiency of oil wells. By matching with data collecting device and GPRS remote data transmission technology, the running current, voltage, power and speed of the motor and the annular pressure can be collected and transferred to the control center in real time, accordingly, the operators can remotely regulate the speed and switch on and off the motor, improving the efficiency of system management and reducing the labor intensity of oil workers.
3.2. Economic benefit
Table 2 shows the energy consumptions, lifting technology and investment of the CYJ12-5-73HB pumping unit and ESPCP with the same lifting capacity (theoretical discharge capacity of 25 m3/d). Compared with the pumping unit, the ESPCP can reduce the initial investment by 3.2×104 RMB, which is 10.1%. In daily operations, ESPCP can save 66 kW·h of electricity per day, and 24 090 kW·h per year, that means each well can save more than 1.7×104 RMB of electricity bill per year.
Table 2 Economic comparison of ESPCP and pumping unit.
| Unit | Power consumption | Lift tech- nology | Investment (at setting depth of 1 300 m)/ 104 RMB |
|---|---|---|---|
| Type 12 Pumping unit | Installed power 30 kW, Daily power consumption 200 kW·h | Rod drive | 31.7 |
| ESPCP | Installed power 12 kW, Daily power consumption 134 kW·h | Submersible motor drive | 28.5 |
4. Conclusions
To solve the problems existing in traditional rod lifting equipment and the demand of oilfields for high-efficiency lifting technology in the new development situation, ESPCP technology suitable for wells with daily liquid production of 5-50 m3 has been basically established by designing the downhole low-speed and high-torque motor. The laboratory experiment data shows that the designed downhole motor has a wide operation power range, higher efficiency and better torque output capacity at low speed, and can meet the need of submersible power-drive PCP running. Field application re-sults show that ESPCP technology can reduce power consumption, improve efficiency, prolong pump checking period, and realize the intrinsic safety of surface operation equipment because of no surface moving parts. It is suitable for deviated wells, directional wells, heavy oil wells, low production and permeability wells and wells in environmentally sensitive areas. Also it has an obvious edge in overall economic benefit compared with the traditional pumping unit equipment.
The technology will be used in more wells with different challenges in the near future. Further theoretical research will be carried out to optimize downhole units according to field operation, and matching compound coiled tubing and all-metal PCP will be developed and tested.
Reference
Current technical status and development trend of artificial lift
New theory and technology for improving efficiency of sucker rod pumping system
Computer simulation model of the system efficiency of rod pumping wells
Artificial lift technique of multistage sliding vane pump used in thermal production wells
DOI:10.1016/S1876-3804(13)60079-8 URL [Cited within: 1]
Research on the mechanical causes of the rod string and tubing wear of rod-pumped wells in water controlled fields
Latest development and project utilization of heater cable in ESP production system
Current research status and development trend of ESP diagnose technology
Research on technology and application of electric submersible screw pump lifting
Research onto the development of ESPCP oil production system
Optimal design and virtual reality modeling of electrical submersible-motor-driven progressive cavity pumping reducer
Analysis of shaft torsion deformation on electromagnetic torque of thin permanent magnet motor for direct-driven submersible screw pump
Shaft torsion deformation and unit-combination on torque ripple of permanent magnet motor for direct-driven submersible screw pump
Research on the direct drive unit-combined super-slender PM motor for submersible screw pump
Research of NDFEB permanent magnet synchronous supersensible motor for screw pump
Key structure design of permanent magnet synchronous motor for direct-drive submersible screw pump
Research on detection of electrical submersible progressing cavity pump’s running state parameters and data transmission
Optimization of ESP system
Simulation model of ESP well system efficiency
Startup torque dynamic model of single progressive cavity pump in surface-driven pumping system
Low speed PM synchronous motor with approximate number of poles and slots
The influence analysis of geometric tolerance and fit clearance to motor gap evenness
Design and analysis of double fractional slot concentrated winding for low-speed submersible motor
A certain number of issues on silicon steel
Research on bearing stability of ESPCP motor protector
Improved design and strength analysis of thrust bearing in ESPCP system
Progressing cavity pump anti-scaling techniques in alkaline-surfactant- polymer flooding in the Daqing Oilfield
DOI:10.1016/S1876-3804(11)60049-9 URL [Cited within: 1]
Dynamics analysis technology for rod string of surface driving screw pump and its application in Daqing Oilfield

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}