Supported by the China National Science and Technology Major Project. 2016ZX05037 Supported by the China National Science and Technology Major Project. 2017ZX05063
Abstract
A flow mathematical model with multiple horizontal wells considering interference between wells and fractures was established by taking the variable width conductivity fractures as basic flow units. Then a semi-analytical approach was proposed to model the production performance of full-life cycle in well pad and to investigate the effect of fracture length, flow capacity, well spacing and fracture spacing on estimated ultimate recovery (EUR). Finally, an integrated workflow is developed to optimize drilling and completion parameters of the horizontal wells by incorporating the productivity prediction and economic evaluation. It is defined as nested optimization which consists of outer-optimization shell (i.e., economic profit as outer constraint) and inner-optimization shell (i.e., fracturing scale as inner constraint). The results show that, when the constraint conditions aren’t considered, the performance of the well pad can be improved by increasing contact area between fracture and formation, reducing interference between fractures/wells, balancing inflow and outflow between fracture and formation, but there is no best compromise between drilling and completion parameters. When only the inner constraint condition is considered, there only exists the optimal fracture conductivity and fracture length. When considering both inner and outer constraints, the optimization decisions including fracture conductivity and fracture length, well spacing, fracture spacing are achieved and correlated. When the fracturing scale is small, small well spacing, wide fracture spacing and short fracture should be adopted. When the fracturing scale is large, big well spacing, small fracture spacing and long fracture should be used.
Keywords:horizontal well
;
multi-staged fracturing
;
fracture flow capacity
;
fracture length
;
well space
;
fracture space
;
parameters optimization
WANG Junlei, JIA Ailin, WEI Yunsheng, JIA Chengye, QI Yadong, YUAN He, JIN Yiqiu. Optimization workflow for stimulation-well spacing design in a multiwell pad. [J], 2019, 46(5): 1039-1050 doi:10.1016/S1876-3804(19)60261-2
Introduction
Horizontal drilling and multistage-hydraulic fracturing have been widely applied in the development of unconventional reservoir oil and gas resources. It is well known that many factors determine the productivity of horizontal wells, including formation petrophysical properties, fluid properties, and completion and fracturing parameters[1]. Among them, formation petrophysical properties and fluid properties are uncontrollable factors, and completion and fracturing parameters are controllable. From the perspective of reservoir engineering, the aim of horizontal well fracturing is to increase contact area between fractures and reservoir, conductivity in propped hydraulic fractures, and reduce flow resistance to enhance well productivity. In the design of development well-pad with multiple fracturing wells, the main indexes need to be considered are well spacing, fracturing stage spacing, amount of proppant per fracture and fracture dimensions (length, width and height)[2,3,4].
The difficulty in optimization of well-pad design is to make sure that the simulation can reflect the characteristics of pro-duction performance under the effects of inter-fracture interference, interwell interference, and fracture conductivity, so the relationships between main factors and production performance and the correlation between the main factors can be made clear. In the terms of performance simulation of multiple fracturing horizontal well (MFHW), several analytical and numerical methods have been developed. On the basis of instantaneous functions presented by Chen and Raghavan[6], Wang et al.[5] obtained the transient response of single MFHW by integrating the analytical solution for uniform-flux fracture with an impact function of fracture conductivity. Chen et al.[7] proposed a semi-analytical method derived from an analytical reservoir solution and a numerical fracture solution to forecast the full life-cycle performance of MFHW, which has the flexibility of capturing the geometry complexity of fracture network and the interplay between reservoir and fractures. Fang et al.[8] established a numerical model considering the multi-scale flow in discrete fractures, and simulated the production performance of a well pad with three volume frac-tured horizontal wells with long lateral section. Considering the well interference through both matrix permeability and hydraulic fracture hits, Yu et al.[9] developed a numerical, compositional model in combination with an embedded discrete fracture model (EDFM) to simulate both the response to interwell interference, to find out the impact of well spacing on pressure interference in the adjacent wells.
In the aspect of analyzing the impact of main control factors, single factor control method is commonly used to examine the factors one by one, which ignores the correlations between the factors and thus could lead to wrong results[10,11,12,13]. Although orthogonal test and grey correlation methods improve in limitedness than the single factor control analysis method, they are still multiple-scheme comparison methods, unable to cover all possible optimal solutions[14,15,16]. Automated optimization algorithms such as artificial neural network and genetic algorithm can provide globally optimal design, but huge in computation, they are time-consuming and can’t be used widely, especially when the number of wells and fracturing stages are large[17,18].
Systematic optimization of completion parameters of MFHWs is a complicated nonlinear problem in the field of reservoir engineering and mathematical optimization. On the basis of a semi-analytical modeling, this paper developed a comprehensive optimization workflow to maximize NPV by integrating extended proppant index method and globally optimal algorithm. The principle objective of this work is to provide a quantitative assessment of optimal decisions such as number of wells, number of fractures per well, mass of proppant and fracture dimensions.
1. Performance modeling of multi-well pad
1.1. Model description
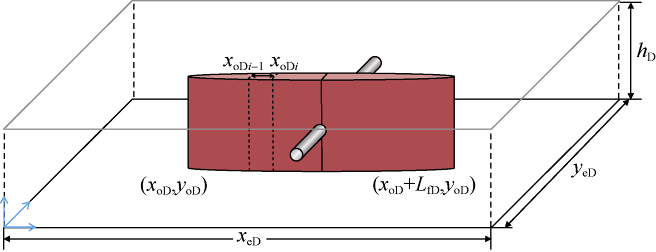
The configuration of the MHFW system used in this study is shown in Fig. 1. All MFHWs are assumed to be evenly located and completed in an isotropic, homogeneous and horizontal formation in rectangular shape. The formation fully penetrated by hydraulic fractures has uniform thickness,permeability and porosity, all of which are constant. All transverse fractures are of identical properties. Besides, all MFHWs are produced at constant bottomhole pressure (BHP).
Fig. 1.
Sketch of the well pad with multiple fracturing horizontal wells.
The fluid flow in the reservoir with low permeability is governed by non-Darcy’s law. Based on Ertekin model[19], the flow velocity in the reservoir is defined as the sum of the component of the Darcy flow velocity and the slip flow velocity:
where the apparent gas slippage term is not a constant but a variable given by ${{b}_{\text{am}}}\text{=}\frac{{{D}_{\text{g}}}{{\mu }_{\text{g}}}{{c}_{\text{g}}}{{p}_{\text{m}}}}{{{K}_{\text{m}}}}\frac{1}{{{p}_{\text{m}}}}$.
The slip velocity is presented by modifying Fick’s law, which is caused by the concentration gradient in the matrix. At matrix-fracture interface, the concentration gradient is negligible[20], and the slippage effect approaches zero, that is:
To linearize the gas-flow governing equations, the pseudo- function approach is defined. Pseudo-pressures in the fracture and reservoir are respectively defined by
where βm is a dimensionless rescaling factor which describes the behavior the fluid viscosity and compressibility during depletion, and λm is a dimensionless viscosity-compressibility ratio, which are defined as follows:
Substituting pseudo-pressure and pseudo-time into the gas governing equation renders gas diffusivity equation amenable to the liquid diffusivity equation.
Since the fluid flow caused by different MFHWs is confined to an identical pressure system, the fluid flow can be decomposed into continuous flow in fractures and flow in reservoirs. In the modeling of the fluid flow, two sets of separate coordinates were adopted for the fracture and reservoir, and the pressure and influx distribution along fracture face can be achieved by coupling the reservoir flow model and fracture model on the basis of continuity condition that the reservoir pressure equals to the fracture pressure on the fracture-reservoir interface.
To reflect the effect of interwell fracturing interference on the opening and propagation of hydraulic fractures, a fracture model with variable width is adopted in this study. To our knowledge, when the propagation direction of hydraulic fracture is parallel to the maximum stress direction, the farther from the wellbore, the stronger the interwell stress will be, thus the net pressure to open up fracture will increase, the migration of proppant will be blocked, and the fracture width will decrease gradually from the wellbore outward[21]. That is expressed as:
For simplicity, dimensionless pseudo-pressure in reservoir, dimensionless pseudo-pressure in fracture, dimensionless production rate and dimensionless cumulative production are respectively defined by
where χ and ψ are scaling factors. In SI unit, χ=0.5/π and ψ=1; in Darcy unit, χ=1.842 and ψ=0.0036.
1.2. Analytical solution of fluid flow in the reservoir
Since all MFHWs are located in a pressure system, the drainage area can be divided into a set of sub-drainage areas according to the principle of pressure superposition. Fig. 2 shows the equivalent sub-drainage area drained by single fracture (sub-drainage area equals to 1/nwnf of total drainage area). Using pseudo-function definitions, the equation governing gas flow in the reservoir is given by
The hydraulic fracture can be regarded as the Green’s function for a line source along which flux density is satisfied as qfD(s). The gas desorption is considered in the dual-porosity model of f(s). After using the Laplace transformation, Equation (16) can be written as the following dimensionless form,
From the perspective of reservoir flow model, the fracture can be discretized into a set of segments, so Eq. (19) is rewritten into a discretized equation in which each segment has a length $\Delta {{x}_{fDi}}$and flux qfDi. Based on the principle of pressure superposition, the pressure at any point in the fracture can be expressed as:
where $\tilde{p}$uDj,i represents the pressure disturbance to the j-th segment caused by i-th segment. According to the Green’s function[22], the dimensionless pressure solution for uniform- flux segment can be written as
1.3. Analytical solution for variable-conductivity fracture
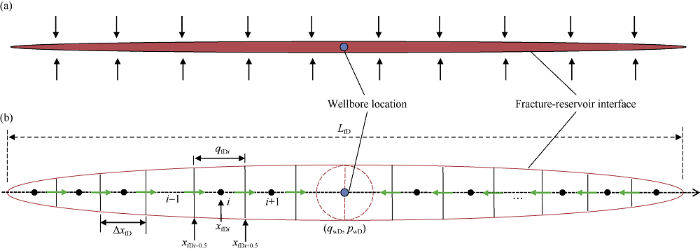
In 1D coordinate of fracture model, the fluid flow from the reservoir into hydraulic fracture, and then flow towards wellbore along fracture panel. As shown in Fig. 3a, the flux density along fracture is given by qf(x,t), and the rate extracted from wellbore is denoted as qw(t).
Equation (23) is a pseudo-linear differential equation because the conductivity CfD is a function of xDhf. Here coordinate transformation equation is introduced to make the pseudo- linear problem linear, which is expressed as
and ${{\hat{C}}_{\text{fD}}}=\frac{{{L}_{\text{fD}}}}{\int_{0}^{{{L}_{\text{fD}}}}{C_{\text{fD}}^{-1}\left[ {{p}_{\text{fD}}}({{x}_{\text{D}}}) \right]d{{x}_{\text{D}}}}}$. Incorporating Equation (25) and boundary element method[23] to deal with Equation (23), the solution for variable conductivity fracture can be derived as
To take the additional pressure drop due to the convergence of fluid into the horizontal wellbore from transverse fractures, the convergence flow skin Sc is introduced to modify Equation (26)[24], which is rewritten as
According to the continuity condition that the reservoir pressure equals to the fracture pressure on the fracture-reservoir interface, the relationship is expressed as:
where${{f}_{\text{c}j}}=\Delta {{\xi }_{\text{D}j}}/\Delta {{x}_{\text{D}j}}$. The element of $\tilde{p}_{\text{uD}j,i}^{{}}({{\beta }_{\text{wD}j}},{{\beta }_{\text{wD}i}})$ in the matrix of Equation (22) is modified as${{f}_{\text{c}j}}\tilde{p}_{\text{uD}j,i}^{{}}({{\beta }_{\text{wD}j}},{{\beta }_{\text{wD}i}})$.
According to coupled condition [Equation (30) and Equation (31)], combining the solution for the reservoir [Equation (22)] and the solution for the fracture [Equation (29)] provides the closed solution for flux-density distribution along fracture and production rate of the well. The unknown variables can be expressed in vector form:
The cumulative production is obtained by using Laplace transformation, which is given by $\tilde{G}$pD=$\tilde{q}$wD/s.
It is worth noting that the pseudo-time is a function of spatial and temporal variables. The pseudo-time can be regarded as single integral of average reservoir pressure over time, as presented in Equation (33), and can be calculated by incorporating material balance equation [Equation (34)]. The detailed information on iteration algorithm is provided in Reference [25].
${{t}_{\text{a}}}=t\ {{\beta }_{\text{m}}}\left[ {{p}_{\text{avg}}}\left( t \right) \right]$
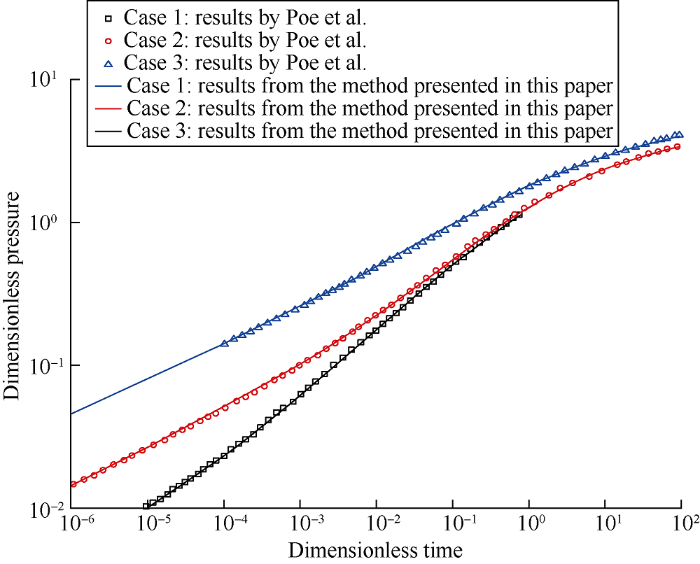
Afterwards, to verify the accuracy of the semi-analytical model in our work, the transient response solutions were compared with other semi-analytical model and the results of numerical simulation. For the semi-analytical results presented by Poe et al.[26], the variation of fracture conductivity is described by four constant-length zones and each zone is assigned a different conductivity. As shown in Fig. 4, our pressure solutions are consistent with Poe’s results, validating the calculation accuracy of our model in simulating pressure in one fracture with variable width.
Fig. 4.
Comparison of transient pressure solutions from our model with solutions from Poe et al.
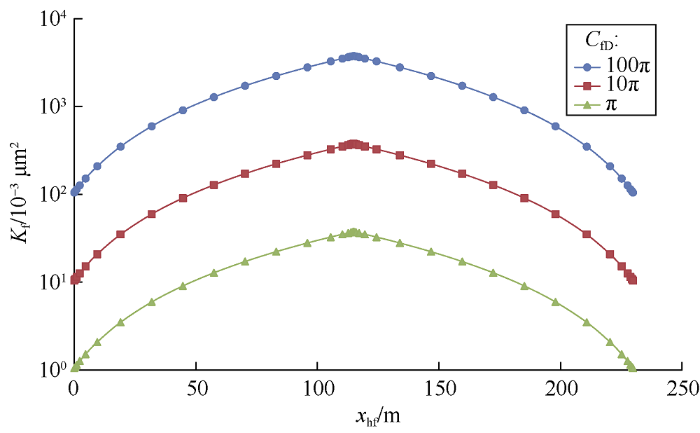
Commercial numerical simulator was used to further verify the reliability of our model in simulating interwell interference. The parameters used in the model were: pi=45.0 MPa, pwf=6.5 MPa, h=20 m, so=85%, ct=4.35×10-4 MPa-1, Km= 0.01×10-3 μm2; μo=1 mPa·s, Bg=1.0 m3/m3, rw=0.019 m; nf=30, x×y×z=1 500 m×1 600 m×20 m, xf=114.95 m, wf=0.0127 m, ϕm=35%. To generate accurate rate response, the local-grid-refinement (LGR) was used to refine the grids around fracture panel. Since φf=35% and wf=0.0127 m, the equivalent fracture porosity calculated is 4.4%, the equivalent fracture width is 0.1 m, and the equivalent fracture permeability is calculated using equation Kfmax=12Cfd, which equals to 37.68×10-3, 376.8×10-3, 3 768×10-3 respectively in this study, the permeability distribution is presented in Fig. 5.
Fig. 5.
Permeability distribution within fracture.
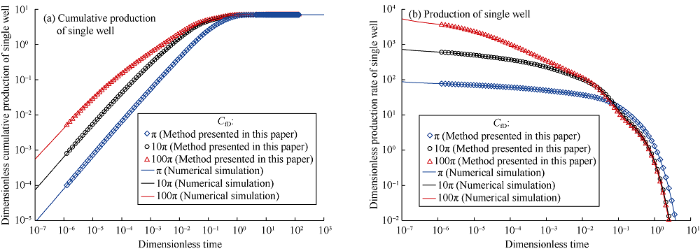
Due to the ideal assumption of even well configuration, all the wells have the same pressure distribution. Fig. 6 shows the dimensionless production performance from numerical simulation and the method presented in this paper, it can be seen the single well production and cumulative production from the two methods tally well with each other, verifying the adaptability of the method proposed in this paper in cases with multiple wells and multiple fractures.
Fig. 6.
Comparison of dimensionless production and cumulative production from the two mehtods.
3. Optimization of fracture parameters and well spacing
As mentioned before, the production performance of well pad is affected by various factors, including fracture dimensions (width, length and height), number of wells, number of fractures, and fracture/well arrangement. To simplify the issue, we assume an ideal homogeneous configuration, with wells and fractures in even distribution and same in dimensions. The fractures occupy the same sub-drainage area (1/(nwnf) of the total drainage area). Thus the factors affecting production performance of the well pad can be reduced to length and conductivity of the fracture.
At a given mass of proppant, the fracture length and fracture width are competing for the proppant. The maximum productivity index would be achieved on the best compromise between length and conductivity. The classical proppant index method theory is originally proposed for single fracture with uniform conductivity in the pseudo-steady state (PSS) flow conditions[27,28], and the objective function is the productivity index in the PSS condition, while not (cumulative) rate in transient conditions.
In this paper, an extension of proppant index method theory to account for the geometry of multiple MFHWs is presented, and the proppant number is modified as
The extended proppant index method could consider time dependency of transient response covering both transient and PSS conditions. The fixed proppant number in the proppant index method is regarded as technical constraint. With further consideration of economic constraint, a nested optimization method containing outer-optimization and inner-optimization shells is further developed to optimize an overall economic objective.
3.1. Inner-optimization shell
Fracture length and conductivity (set the fracture height is the same as the formation thickness) are key parameters of inflow and outflow relations between fracture and reservoir. Considering about the positive relationship of fracture width and fracture permeability, fracture conductivity ability (Kfwf) is used to represent fracture width. We take a single fracture as an example to discuss the optimization process of fracture length and conductivity. The fracture size are assumed as 400 m×50 m×20 m, where the fracture length is represented by fracture-penetration ratio (Ix=Lf/xe), and the fracture width is represented by dimensionless conductivity.
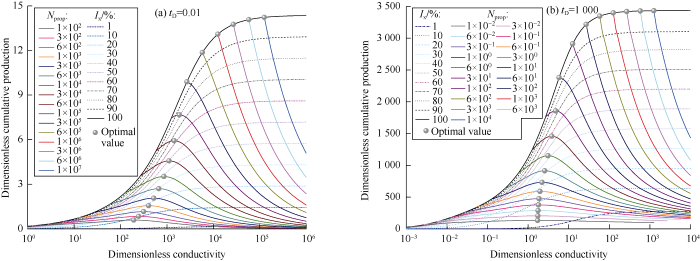
The optimization results of fracture conductivity and length with proppant index in Fig. 7 show when proppant volume is not considered, estimated ultimate recovery (EUR) denoted by dashed line increases monotonously with the increase of Ix and CfD till reaches the maximum value. At this point, the fracture full penetrates the drainage area and reaches infinite conductivity. When the constraint of proppant volume is considered, the cumulative production and fracture dimensions have optimal values, which are denoted by discrete points in the Fig. 7. The maximum conductivity and length cumulative production increases with the increase of proppant index. More interestingly, the optimum fracture conductivity and length are different at different times as seen from Fig. 7a, 7b.
Fig. 7.
Optimization of dimension of fractures with finite conductivity.
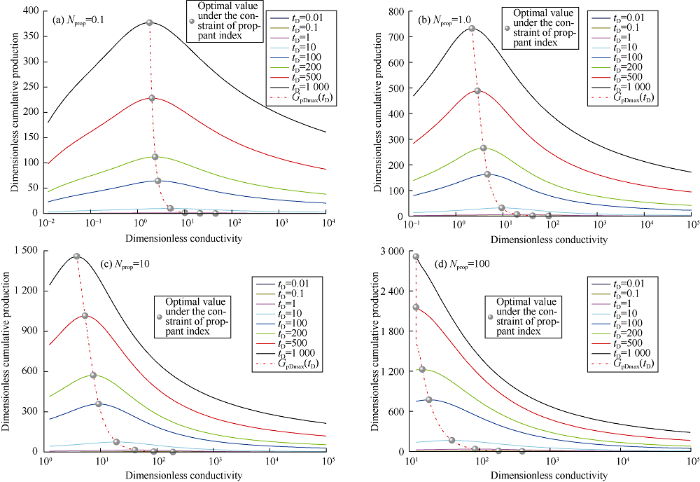
To determine the effect of production time on the optimum results of fracture conductivity and length, the optimized fracture dimensions with time were calculated (Fig. 8). As shown in Fig. 8a, as expected, EURmax is an increasing function of tD for Nprop=0.1, while CfDopt is a decreasing function and approaches a limit. From Fig. 8b to Fig. 8d, we can see that the larger the proppant index, the larger the dimensionless cumulative production at the same time will be, the wider the variation range of optimum dimensionless conductivity in the same time interval, and the larger the value the dimensionless conductivity approaches will be. For example, as presented in Fig. 8b for Nprop=1, when tD is in the range of 0.01-1000, the corresponding CfD,opt is in the range of 1.62-100.00, and the limit value of CfD,lim is approaching 1.62. In contrast, in Fig. 8d for Nprop=1000, the variation range of CfD,opt is 15-400 with CfD,lim=15.
Fig. 8.
Optimization of fracture dimensions under finite conductivity at different proppant indexes.
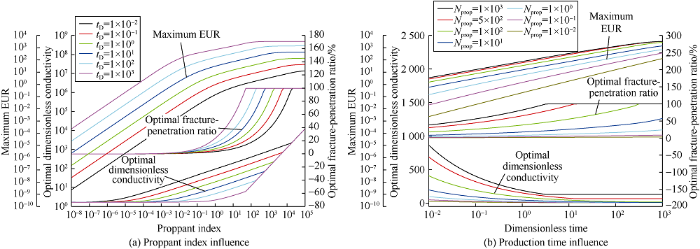
Fig. 9 shows the variation patterns of maximum EUR and optimal fracture conductivity and length at different proppant indexes and different times. Fig. 9a shows a positive correlation between CfD,opt and Nprop, which means that the CfD,opt decreases with the decrease of Nprop till reaches a limited value and then keeps constant basically. The bigger the value of tD is, the larger the variation range of Nprop. For example, when tD=1000, CfD,opt approximates a constant in the range of Nprop=1×10-8-1×10-1. However, when tD=0.01, Nprop is in the range of 1×10-8-1×10-7. Besides, both CfD,opt and t Ix,opt increases with Ix. Once Ix is fixed at unity, CfD,opt would show a linear relation with Nprop. Fig. 9b shows that for a given Nprop, CfD,opt decreases with time and approaches a constant value. The constant value of CfD,lim is positively correlated with Nprop [e.g., CfD,opt=1.62 for Nprop=1×10-2, while CfD,opt=175 for Nprop=1×103]. Put it in another way, when dimensionless fixed period of time is shorter, the optimum design indicates a fracture with shorter length and higher conductivity; when dimensionless fixed period of time is longer, the opposite is the case. It is worth noting that the characteristic value of CfD,opt is 1.62 in the case of small Nprop, which is consistent with the results of Valko and Economides[27], proving the method presented in this paper is reliable.
Fig. 9.
Effect of fixed period of time and proppant index on the optimal fracture conductivity and length.
3.2. Outer-optimization shell
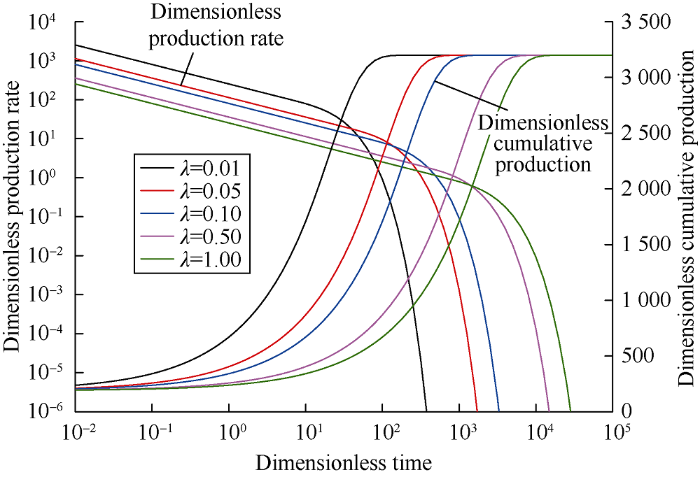
Assuming the drainage area is fixed, the geometrical shape affects the well performance and the optimum fracture conductivity and length. The drainage-area aspect ratio describes the geometrical shape, which is defined as λ=ye/xe. Noted that aspect ratio is also determined by nw and nf (ye=yef/nf, xe=xef/nw). Fig. 10 shows the effect of λ on the production performance. In this case, the fractures are assumed to fully penetrate the pay in the plane, and all fractures have infinite conductivity. The maximum dimensionless accumulative production (0.5xeDyeD/π) could be reached when the production decreased to 0 with a fixed drainage area, irrelevant to the ratio of λ. The initial rate is higher and the maximum EUR is reached in a shorter duration for drainage area with more pronounced elongation when λ is smaller. In fact, the more elongated the drainage area, the more efficiently it can be drained, since the corresponding fracture length is larger, thus making it easy to drain the whole drainage area.
Fig. 10.
Effect of drainage-area aspect ratio on performance.
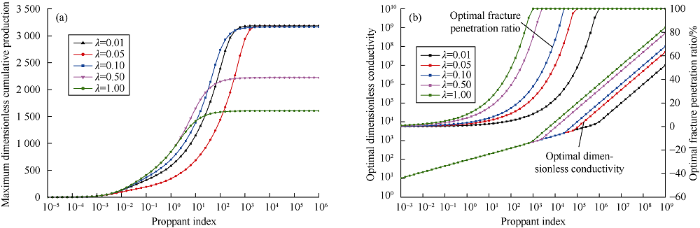
When the proppant number is taken into account, Fig. 11 shows the effect of λ on maximum EUR and the optimal fracture conductivity and length when tD is small. Fig. 11a shows that EURmax increases with Nprop until reaches the peak. The smaller the λ (small fracture space and large well space), the larger the maximum dimensionless cumulative production will be, and at this point, the fractures penetrate the whole formation and reach infinite conductivity (Fig. 11b). When the proppant index is smaller (less than 1×103), for different λ values, the corresponding optimum conductivities are the same, but the optimum fracture-penetration ratio is larger with larger value of λ (Fig. 11b), so the corresponding maximum dimensionless cumulative production is larger (Fig. 11a). It must be highlighted that the production characteristics reflected by the template in Fig. 11 is related to the production time; when the time is long enough, the peak values of EURmax for all λ values are equal; when the time is short enough, λ has little effect on type curves (shown in Fig. 11) in the case of smaller Nprop.
Fig. 11.
Effect of fracture space/well space ratio on (a) maximum EUR and (b) optimal fracture conductivity and length when tD=1000.
3.3. Nested optimization
The development effect of multi-stage fracturing horizontal well is optimized by increasing the contact area between fractures and formation, reducing interwell and inter-fracture interferences, balancing the inflow and outflow between fracture and formation. When these seepage relationships reach balance, the production effect is the best. In this study, half of the well pad is assumed to be 1 500 m×1 500 m×20 m, with the proppant volume as constrain, and the NPV as the objective function, a nested method was used to optimize the parameters. The detailed workflow entails the following steps.
Step 1: Define input variables, including reservoir/well properties, fluid properties, proppant type and the targeted production period.
Step 2: Define three key variables to be optimized, including number of wells nw, number of fracturing stages per well nf, and proppant volume per fracture, Mp.
Step 3: Calculate the optimum fracture conductivity and length and maximum cumulative production at different number of wells, fracturing stages and proppant volumes by using the proppant index method.
Step 4: Calculate the corresponding NPV.
Step 5: Based on Powell global-optimization algorithm, return to Step 2 till the maximum NPV is achieved, and the horizontal well and fracturing parameters at this point are the best design parameters.
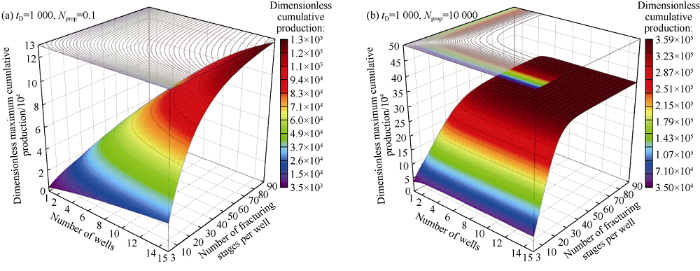
In this case, the selected dimensionless fixed period of time is set to be 1000, and total mass of proppant of multiwell pad is assumed to be fixed, as the actual fracturing scale is limited by engineering conditions. Fig. 12 shows a 3D plot of the total EURmax variation with the combination of nw and nf. It can be seen from Fig. 12, EURmax increases with the increase of wells and fracturing stages monotonously. When the proppant index is smaller, EURmax gradually increases in the same magnitude with the increase of wells and fracturing stages (Fig. 12a). When proppant index is bigger, the increase magnitude of EURmax decreases relativley. When the fracturing stages are more than 30 and well pads are more than 5, the EURmax hardly increase anymore (Fig. 12b). Therefore, in the case with the EURmax as the objective function and the fracturing scale as the constraint, there is only optimal fracture conductivity and length but no optimal well space (number of wells) and fracture space (number of fractures) for a well pad.
Fig. 12.
Maximum EUR values with different proppant indexes.
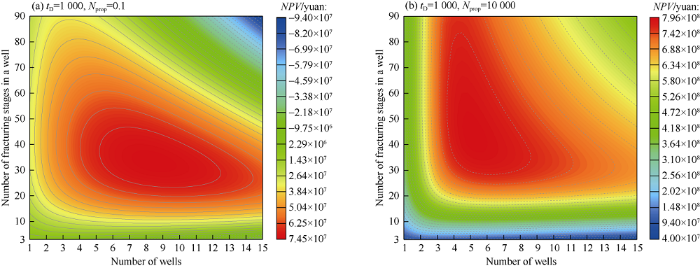
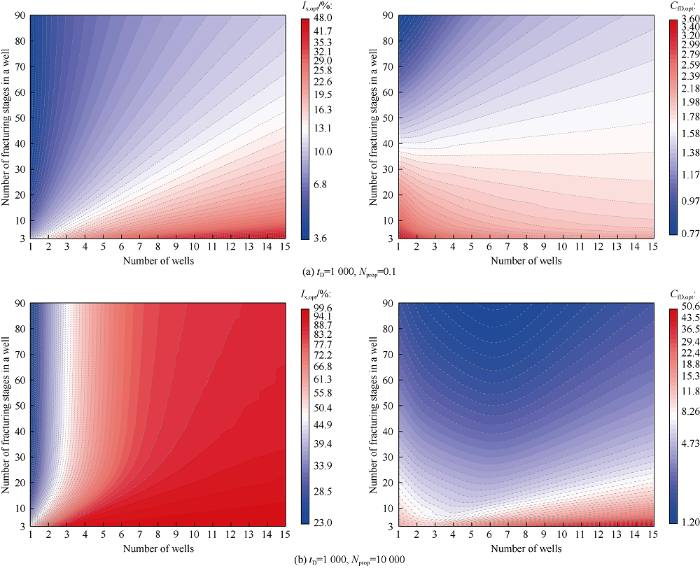
Substituting the development index results into the economic evaluation model, the optimization was repeated with NPV as the objective function, the results are shown in Fig. 13. There are obvious extreme points in Fig. 13, indicating there are optimum well space and fracture space in this case. Similarly, the corresponding optimization results of fracture conductivity and length are shown in Fig. 14. It can be seen with the increase of nw and nf, although the EURmax increases, the costs also go up. In other words, when the incremental NPV caused by EUR increase is offset by the cost increase caused by creating more wells and fractures, the economic benefit would get worse gradually. Therefore, under the dual constraints of fracturing scale and economic benefit, there are optimum nw, nf and fracture conductivity and length for a well pad, providing optimization room in development program design.
Fig. 14.
Variation of optimal fracture conductivity and length with number of wells and number of fractures per well.
It can be seen from Figs. 13 and 14, when the proppant index is smaller (Nprop=0.1), the optimal well space is smaller (nw,opt≈8), the optimal fracture space is wider (nf,opt≈35), the corresponding optimal fracture-penetration ratio is smaller (Ix,opt≈11%), and the fracture conductivity is smaller (CfD,opt≈ 1.60). When the fracturing scale is larger (Nprop=1×104), compared with the case with small fracturing scale, the optimal well space increases (nw,opt≈6), the optimal fracture space decreases (nf,opt≈50), the fracture penetration rate increases significantly (Ix,opt≈72%), but the optimal conductivity is still fairly low (CfD,opt≈3.54).
The specific results of nested optimization are related to input parameters, such as geometry of the well pad, development duration, economic parameters, complexity of fracture networks and constraint conditions (i.e., mass of proppant per fracture, well or well pad etc.). However, these general statements can serve as reference in the more-detailed optimization works.
4. Conclusions
In this study, we established a general semi-analytical model to study the production performance of a well pad with multiple MFHWs. Dimension transformation is incorporated to change the flow equation of the variable conductivity fracture into the equation of the constant conductivity fracture, and a universal approach is developed to solve the coupled reservoir-fracture flow model.
In the inner-optimization shell, there exists a best compromise between fracture conductivity and fracture length under the constraint of fracturing scale. As proppant index and time increase, the maximum accumulative production increases monotonously, the optimal fracture penetration rate also increases. With the decrease of proppant index and increase of time, the optimal conductivity of fracture decreases gradually and approaches to a limited value (CfD,lim=1.62). Besides, the ratio of fracture space to well space also affects the results of the optimal fracture conductivity and length. In the case with larger Nprop, the design with larger well space and smaller fracture space is better.
When economic benefit isn’t considered, the EURmax increases with the increase of nw and nf, there is no optimal wells and fracturing stages. But the EUR increase magnitude decreases with the increase of proppant index, when the nw and nf reach a critical value, the EUR doesn’t increase anymore.
In the nested optimization accounting for technical and economic constraints, there exists room for optimization of fracture design when the NPV increment can be offset by increase in cost. When the Nprop is relatively lower, the design with more wells and short-length fractures is suggested; when the Nprop is higher, the design with less wells and longer fractures is better.
Nomenclature
ag—gas desorption coefficient, dimensionless;
Bg—gas volume factor, m3/m3;
bam— slippage factor, dimensionless;
CfD—dimensionless fracture conductivity;
Cfracture— cost of fracturing one stage, Yuan;
Cwell—the cost of drilling one well, Yuan;
ct—formation compressibility factor, Pa-1;
cg—gas compressibility factor, Pa-1;
DD—dimensionless diffusivity coefficient;
Dg—gas diffusivity coefficient in matrix, m2/s;
FC—the total fixed cost, Yuan;
Gp—cumulative production, m3;
Gp,ii—the ii-th year cumulative production, m3;
h—formation thickness, m;
Ix—fracture penetration ratio;
ii—year number;
ir—annual interest rate, dimensionless;
Kf—fracture permeability, m2;
Km—reservoir permeability, m2;
Lf—fracture length, m;
Lref—reference length, m;
mf—pseudo-pressure in fracture, Pa;
mm—pseudo-pressure in matrix, Pa;
N—fracture micro-stage;
Nprop—proppant index;
NPV—net present value, yuan;
n—infinite series;
nf—number of fractures per well;
nw—number of wells in a well pad;
nyear— production time, a;
OGIP—original gas in place, m3;
Pgas—gas price, Yuan/m3;
p—pressure, Pa;
pf—initial pressure of fracture, Pa;
pm—formation pressure, Pa;
pw—wellbore pressure, Pa;
pwf—bottomhole pressure, Pa;
qf—influx density, m2/s;
qm—formation flow density, m3/s;
qw—production rate, m3/s;
$\tilde{q}_{\text{fD}n,i}^{\quad \left\langle w \right\rangle }$—dimensionless production of the i-th segment of n-th fracture in w-th well;
Rm—pore radius of gas desorption, m;
rw—wellbore radius, m;
s—Laplace variable, dimensionless;
Sc—conflux skin factor, dimensionless;
T—Temperature, K;
t—time, s;
ta—pseudo-time, s;
Vprop—volume of proppant, m3;
V—gas concentration, m3/m3;
VE—gas concentration in the center of spherical pore, m3/m3;
vm—flow velocity in matrix, m/s;
wf—fracture width, m;
x, y—formation system coordinate, m;
xe—width of sub-drainage area, m;
xef—reservoir width, m;
xf—fracture half-length, m;
Δxf—fracture micro-stage length, m;
xhf—coordinate in fracture, m;
xo, yo—end points of fracture, m;
xwhf—intersection between fracture and wellbore, m;
Productivity-index behavoir for hydraulically fractured reservoirs depleted by constant production rate considering transient-state and semisteady-state conditions
A semianalytical methodology to diagnose the location of underperforming hydraulic fractures through pressure-transient analysis in tight gas reservoir
Productivity-index behavoir for hydraulically fractured reservoirs depleted by constant production rate considering transient-state and semisteady-state conditions
1
... Horizontal drilling and multistage-hydraulic fracturing have been widely applied in the development of unconventional reservoir oil and gas resources. It is well known that many factors determine the productivity of horizontal wells, including formation petrophysical properties, fluid properties, and completion and fracturing parameters[1]. Among them, formation petrophysical properties and fluid properties are uncontrollable factors, and completion and fracturing parameters are controllable. From the perspective of reservoir engineering, the aim of horizontal well fracturing is to increase contact area between fractures and reservoir, conductivity in propped hydraulic fractures, and reduce flow resistance to enhance well productivity. In the design of development well-pad with multiple fracturing wells, the main indexes need to be considered are well spacing, fracturing stage spacing, amount of proppant per fracture and fracture dimensions (length, width and height)[2,3,4]. ...
Key mechanical problems in the development of shale gas reservoirs. SCIENTIA SINICA Physica,
1
2013
... Horizontal drilling and multistage-hydraulic fracturing have been widely applied in the development of unconventional reservoir oil and gas resources. It is well known that many factors determine the productivity of horizontal wells, including formation petrophysical properties, fluid properties, and completion and fracturing parameters[1]. Among them, formation petrophysical properties and fluid properties are uncontrollable factors, and completion and fracturing parameters are controllable. From the perspective of reservoir engineering, the aim of horizontal well fracturing is to increase contact area between fractures and reservoir, conductivity in propped hydraulic fractures, and reduce flow resistance to enhance well productivity. In the design of development well-pad with multiple fracturing wells, the main indexes need to be considered are well spacing, fracturing stage spacing, amount of proppant per fracture and fracture dimensions (length, width and height)[2,3,4]. ...
Effect of non-uniform fracture spacing and fracture half-length on well spacing for unconventional gas reservoirs
1
... Horizontal drilling and multistage-hydraulic fracturing have been widely applied in the development of unconventional reservoir oil and gas resources. It is well known that many factors determine the productivity of horizontal wells, including formation petrophysical properties, fluid properties, and completion and fracturing parameters[1]. Among them, formation petrophysical properties and fluid properties are uncontrollable factors, and completion and fracturing parameters are controllable. From the perspective of reservoir engineering, the aim of horizontal well fracturing is to increase contact area between fractures and reservoir, conductivity in propped hydraulic fractures, and reduce flow resistance to enhance well productivity. In the design of development well-pad with multiple fracturing wells, the main indexes need to be considered are well spacing, fracturing stage spacing, amount of proppant per fracture and fracture dimensions (length, width and height)[2,3,4]. ...
Optimization of shale gas well pattern and spacing
1
2018
... Horizontal drilling and multistage-hydraulic fracturing have been widely applied in the development of unconventional reservoir oil and gas resources. It is well known that many factors determine the productivity of horizontal wells, including formation petrophysical properties, fluid properties, and completion and fracturing parameters[1]. Among them, formation petrophysical properties and fluid properties are uncontrollable factors, and completion and fracturing parameters are controllable. From the perspective of reservoir engineering, the aim of horizontal well fracturing is to increase contact area between fractures and reservoir, conductivity in propped hydraulic fractures, and reduce flow resistance to enhance well productivity. In the design of development well-pad with multiple fracturing wells, the main indexes need to be considered are well spacing, fracturing stage spacing, amount of proppant per fracture and fracture dimensions (length, width and height)[2,3,4]. ...
Transient pressure analysis of multiple-fractured horizontal wells in boxed reservoirs
1
2014
... The difficulty in optimization of well-pad design is to make sure that the simulation can reflect the characteristics of pro-duction performance under the effects of inter-fracture interference, interwell interference, and fracture conductivity, so the relationships between main factors and production performance and the correlation between the main factors can be made clear. In the terms of performance simulation of multiple fracturing horizontal well (MFHW), several analytical and numerical methods have been developed. On the basis of instantaneous functions presented by Chen and Raghavan[6], Wang et al.[5] obtained the transient response of single MFHW by integrating the analytical solution for uniform-flux fracture with an impact function of fracture conductivity. Chen et al.[7] proposed a semi-analytical method derived from an analytical reservoir solution and a numerical fracture solution to forecast the full life-cycle performance of MFHW, which has the flexibility of capturing the geometry complexity of fracture network and the interplay between reservoir and fractures. Fang et al.[8] established a numerical model considering the multi-scale flow in discrete fractures, and simulated the production performance of a well pad with three volume frac-tured horizontal wells with long lateral section. Considering the well interference through both matrix permeability and hydraulic fracture hits, Yu et al.[9] developed a numerical, compositional model in combination with an embedded discrete fracture model (EDFM) to simulate both the response to interwell interference, to find out the impact of well spacing on pressure interference in the adjacent wells. ...
A multiple-fractured horizontal well in a rectangular drainage region
1
... The difficulty in optimization of well-pad design is to make sure that the simulation can reflect the characteristics of pro-duction performance under the effects of inter-fracture interference, interwell interference, and fracture conductivity, so the relationships between main factors and production performance and the correlation between the main factors can be made clear. In the terms of performance simulation of multiple fracturing horizontal well (MFHW), several analytical and numerical methods have been developed. On the basis of instantaneous functions presented by Chen and Raghavan[6], Wang et al.[5] obtained the transient response of single MFHW by integrating the analytical solution for uniform-flux fracture with an impact function of fracture conductivity. Chen et al.[7] proposed a semi-analytical method derived from an analytical reservoir solution and a numerical fracture solution to forecast the full life-cycle performance of MFHW, which has the flexibility of capturing the geometry complexity of fracture network and the interplay between reservoir and fractures. Fang et al.[8] established a numerical model considering the multi-scale flow in discrete fractures, and simulated the production performance of a well pad with three volume frac-tured horizontal wells with long lateral section. Considering the well interference through both matrix permeability and hydraulic fracture hits, Yu et al.[9] developed a numerical, compositional model in combination with an embedded discrete fracture model (EDFM) to simulate both the response to interwell interference, to find out the impact of well spacing on pressure interference in the adjacent wells. ...
A practical methodology for production-data analysis of single-phase unconventional wells with complex fracture geometry
2
... The difficulty in optimization of well-pad design is to make sure that the simulation can reflect the characteristics of pro-duction performance under the effects of inter-fracture interference, interwell interference, and fracture conductivity, so the relationships between main factors and production performance and the correlation between the main factors can be made clear. In the terms of performance simulation of multiple fracturing horizontal well (MFHW), several analytical and numerical methods have been developed. On the basis of instantaneous functions presented by Chen and Raghavan[6], Wang et al.[5] obtained the transient response of single MFHW by integrating the analytical solution for uniform-flux fracture with an impact function of fracture conductivity. Chen et al.[7] proposed a semi-analytical method derived from an analytical reservoir solution and a numerical fracture solution to forecast the full life-cycle performance of MFHW, which has the flexibility of capturing the geometry complexity of fracture network and the interplay between reservoir and fractures. Fang et al.[8] established a numerical model considering the multi-scale flow in discrete fractures, and simulated the production performance of a well pad with three volume frac-tured horizontal wells with long lateral section. Considering the well interference through both matrix permeability and hydraulic fracture hits, Yu et al.[9] developed a numerical, compositional model in combination with an embedded discrete fracture model (EDFM) to simulate both the response to interwell interference, to find out the impact of well spacing on pressure interference in the adjacent wells. ...
... To account for the effect of gas desorption, qde(t) is defined to describe the supply of gas desorption[7]: ...
A numerical simulation model for multi-scale flow in tight oil reservoirs
1
2017
... The difficulty in optimization of well-pad design is to make sure that the simulation can reflect the characteristics of pro-duction performance under the effects of inter-fracture interference, interwell interference, and fracture conductivity, so the relationships between main factors and production performance and the correlation between the main factors can be made clear. In the terms of performance simulation of multiple fracturing horizontal well (MFHW), several analytical and numerical methods have been developed. On the basis of instantaneous functions presented by Chen and Raghavan[6], Wang et al.[5] obtained the transient response of single MFHW by integrating the analytical solution for uniform-flux fracture with an impact function of fracture conductivity. Chen et al.[7] proposed a semi-analytical method derived from an analytical reservoir solution and a numerical fracture solution to forecast the full life-cycle performance of MFHW, which has the flexibility of capturing the geometry complexity of fracture network and the interplay between reservoir and fractures. Fang et al.[8] established a numerical model considering the multi-scale flow in discrete fractures, and simulated the production performance of a well pad with three volume frac-tured horizontal wells with long lateral section. Considering the well interference through both matrix permeability and hydraulic fracture hits, Yu et al.[9] developed a numerical, compositional model in combination with an embedded discrete fracture model (EDFM) to simulate both the response to interwell interference, to find out the impact of well spacing on pressure interference in the adjacent wells. ...
Physical models for inter-well interference in shale reservoirs: Relative impacts of fracture hits and matrix permeability
1
... The difficulty in optimization of well-pad design is to make sure that the simulation can reflect the characteristics of pro-duction performance under the effects of inter-fracture interference, interwell interference, and fracture conductivity, so the relationships between main factors and production performance and the correlation between the main factors can be made clear. In the terms of performance simulation of multiple fracturing horizontal well (MFHW), several analytical and numerical methods have been developed. On the basis of instantaneous functions presented by Chen and Raghavan[6], Wang et al.[5] obtained the transient response of single MFHW by integrating the analytical solution for uniform-flux fracture with an impact function of fracture conductivity. Chen et al.[7] proposed a semi-analytical method derived from an analytical reservoir solution and a numerical fracture solution to forecast the full life-cycle performance of MFHW, which has the flexibility of capturing the geometry complexity of fracture network and the interplay between reservoir and fractures. Fang et al.[8] established a numerical model considering the multi-scale flow in discrete fractures, and simulated the production performance of a well pad with three volume frac-tured horizontal wells with long lateral section. Considering the well interference through both matrix permeability and hydraulic fracture hits, Yu et al.[9] developed a numerical, compositional model in combination with an embedded discrete fracture model (EDFM) to simulate both the response to interwell interference, to find out the impact of well spacing on pressure interference in the adjacent wells. ...
Productivity calculation and distribution of staged multi-cluster fractured horizontal wells
1
2014
... In the aspect of analyzing the impact of main control factors, single factor control method is commonly used to examine the factors one by one, which ignores the correlations between the factors and thus could lead to wrong results[10,11,12,13]. Although orthogonal test and grey correlation methods improve in limitedness than the single factor control analysis method, they are still multiple-scheme comparison methods, unable to cover all possible optimal solutions[14,15,16]. Automated optimization algorithms such as artificial neural network and genetic algorithm can provide globally optimal design, but huge in computation, they are time-consuming and can’t be used widely, especially when the number of wells and fracturing stages are large[17,18]. ...
Advanced production decline analysis of tight gas wells with variable fracture conductivity
1
2018
... In the aspect of analyzing the impact of main control factors, single factor control method is commonly used to examine the factors one by one, which ignores the correlations between the factors and thus could lead to wrong results[10,11,12,13]. Although orthogonal test and grey correlation methods improve in limitedness than the single factor control analysis method, they are still multiple-scheme comparison methods, unable to cover all possible optimal solutions[14,15,16]. Automated optimization algorithms such as artificial neural network and genetic algorithm can provide globally optimal design, but huge in computation, they are time-consuming and can’t be used widely, especially when the number of wells and fracturing stages are large[17,18]. ...
Deliverability evaluation method based on volume source for horizontal wells by staged fracturing
1
2015
... In the aspect of analyzing the impact of main control factors, single factor control method is commonly used to examine the factors one by one, which ignores the correlations between the factors and thus could lead to wrong results[10,11,12,13]. Although orthogonal test and grey correlation methods improve in limitedness than the single factor control analysis method, they are still multiple-scheme comparison methods, unable to cover all possible optimal solutions[14,15,16]. Automated optimization algorithms such as artificial neural network and genetic algorithm can provide globally optimal design, but huge in computation, they are time-consuming and can’t be used widely, especially when the number of wells and fracturing stages are large[17,18]. ...
A semianalytical methodology to diagnose the location of underperforming hydraulic fractures through pressure-transient analysis in tight gas reservoir
1
2017
... In the aspect of analyzing the impact of main control factors, single factor control method is commonly used to examine the factors one by one, which ignores the correlations between the factors and thus could lead to wrong results[10,11,12,13]. Although orthogonal test and grey correlation methods improve in limitedness than the single factor control analysis method, they are still multiple-scheme comparison methods, unable to cover all possible optimal solutions[14,15,16]. Automated optimization algorithms such as artificial neural network and genetic algorithm can provide globally optimal design, but huge in computation, they are time-consuming and can’t be used widely, especially when the number of wells and fracturing stages are large[17,18]. ...
Influence factors of single well’s productivity in the Bakken tight oil reservoir
1
2013
... In the aspect of analyzing the impact of main control factors, single factor control method is commonly used to examine the factors one by one, which ignores the correlations between the factors and thus could lead to wrong results[10,11,12,13]. Although orthogonal test and grey correlation methods improve in limitedness than the single factor control analysis method, they are still multiple-scheme comparison methods, unable to cover all possible optimal solutions[14,15,16]. Automated optimization algorithms such as artificial neural network and genetic algorithm can provide globally optimal design, but huge in computation, they are time-consuming and can’t be used widely, especially when the number of wells and fracturing stages are large[17,18]. ...
Productivity analysis and completion optimization of fractured horizontal wells in low- permeability tight gas reservoir
1
2016
... In the aspect of analyzing the impact of main control factors, single factor control method is commonly used to examine the factors one by one, which ignores the correlations between the factors and thus could lead to wrong results[10,11,12,13]. Although orthogonal test and grey correlation methods improve in limitedness than the single factor control analysis method, they are still multiple-scheme comparison methods, unable to cover all possible optimal solutions[14,15,16]. Automated optimization algorithms such as artificial neural network and genetic algorithm can provide globally optimal design, but huge in computation, they are time-consuming and can’t be used widely, especially when the number of wells and fracturing stages are large[17,18]. ...
An efficient reservoir-simulation approach to design and optimize unconventional gas production
1
... In the aspect of analyzing the impact of main control factors, single factor control method is commonly used to examine the factors one by one, which ignores the correlations between the factors and thus could lead to wrong results[10,11,12,13]. Although orthogonal test and grey correlation methods improve in limitedness than the single factor control analysis method, they are still multiple-scheme comparison methods, unable to cover all possible optimal solutions[14,15,16]. Automated optimization algorithms such as artificial neural network and genetic algorithm can provide globally optimal design, but huge in computation, they are time-consuming and can’t be used widely, especially when the number of wells and fracturing stages are large[17,18]. ...
Application of genetic algorithm for well placement optimization in Sulige gasfield
1
2014
... In the aspect of analyzing the impact of main control factors, single factor control method is commonly used to examine the factors one by one, which ignores the correlations between the factors and thus could lead to wrong results[10,11,12,13]. Although orthogonal test and grey correlation methods improve in limitedness than the single factor control analysis method, they are still multiple-scheme comparison methods, unable to cover all possible optimal solutions[14,15,16]. Automated optimization algorithms such as artificial neural network and genetic algorithm can provide globally optimal design, but huge in computation, they are time-consuming and can’t be used widely, especially when the number of wells and fracturing stages are large[17,18]. ...
Artificial neural network (ANN) to estimate reservoir parameters in naturally fractured reservoirs using well test data
1
2014
... In the aspect of analyzing the impact of main control factors, single factor control method is commonly used to examine the factors one by one, which ignores the correlations between the factors and thus could lead to wrong results[10,11,12,13]. Although orthogonal test and grey correlation methods improve in limitedness than the single factor control analysis method, they are still multiple-scheme comparison methods, unable to cover all possible optimal solutions[14,15,16]. Automated optimization algorithms such as artificial neural network and genetic algorithm can provide globally optimal design, but huge in computation, they are time-consuming and can’t be used widely, especially when the number of wells and fracturing stages are large[17,18]. ...
Dynamic gas slippage: A unique dual-mechanism approach to the flow of gas in tight formation
1
1986
... The fluid flow in the reservoir with low permeability is governed by non-Darcy’s law. Based on Ertekin model[19], the flow velocity in the reservoir is defined as the sum of the component of the Darcy flow velocity and the slip flow velocity: ...
Modeling of fluid transfer from shale matrix to fracture network
1
... The slip velocity is presented by modifying Fick’s law, which is caused by the concentration gradient in the matrix. At matrix-fracture interface, the concentration gradient is negligible[20], and the slippage effect approaches zero, that is: ...
Study of 2-D and 3-D hydraulic fractures with non-uniform conductivity and geometry using source and sink function methods
1
... To reflect the effect of interwell fracturing interference on the opening and propagation of hydraulic fractures, a fracture model with variable width is adopted in this study. To our knowledge, when the propagation direction of hydraulic fracture is parallel to the maximum stress direction, the farther from the wellbore, the stronger the interwell stress will be, thus the net pressure to open up fracture will increase, the migration of proppant will be blocked, and the fracture width will decrease gradually from the wellbore outward[21]. That is expressed as: ...
The use of source and Green’s functions in solving unsteady-flow problems in reservoirs
1
... where $\tilde{p}$uDj,i represents the pressure disturbance to the j-th segment caused by i-th segment. According to the Green’s function[22], the dimensionless pressure solution for uniform- flux segment can be written as ...
Fracture propagation laws in staged hydraulic fracturing and their effects on fracture conductivities
1
2017
... and ${{\hat{C}}_{\text{fD}}}=\frac{{{L}_{\text{fD}}}}{\int_{0}^{{{L}_{\text{fD}}}}{C_{\text{fD}}^{-1}\left[ {{p}_{\text{fD}}}({{x}_{\text{D}}}) \right]d{{x}_{\text{D}}}}}$. Incorporating Equation (25) and boundary element method[23] to deal with Equation (23), the solution for variable conductivity fracture can be derived as ...
Productivity analysis of horizontal wells intercepted by multiple finite-conductivity fractures
1
2010
... To take the additional pressure drop due to the convergence of fluid into the horizontal wellbore from transverse fractures, the convergence flow skin Sc is introduced to modify Equation (26)[24], which is rewritten as ...
A density-diffusivity approach for the unsteady state analysis of natural gas reservoirs
0
2012
Pressure transient behavior of a finite-conductivity fractured well with spatially varying fracture properties
1
... Afterwards, to verify the accuracy of the semi-analytical model in our work, the transient response solutions were compared with other semi-analytical model and the results of numerical simulation. For the semi-analytical results presented by Poe et al.[26], the variation of fracture conductivity is described by four constant-length zones and each zone is assigned a different conductivity. As shown in Fig. 4, our pressure solutions are consistent with Poe’s results, validating the calculation accuracy of our model in simulating pressure in one fracture with variable width. ...
Heavy crude production from shallow formations: Long horizontal wells versus horizontal fractures
2
... At a given mass of proppant, the fracture length and fracture width are competing for the proppant. The maximum productivity index would be achieved on the best compromise between length and conductivity. The classical proppant index method theory is originally proposed for single fracture with uniform conductivity in the pseudo-steady state (PSS) flow conditions[27,28], and the objective function is the productivity index in the PSS condition, while not (cumulative) rate in transient conditions. ...
... Fig. 9 shows the variation patterns of maximum EUR and optimal fracture conductivity and length at different proppant indexes and different times. Fig. 9a shows a positive correlation between CfD,opt and Nprop, which means that the CfD,opt decreases with the decrease of Nprop till reaches a limited value and then keeps constant basically. The bigger the value of tD is, the larger the variation range of Nprop. For example, when tD=1000, CfD,opt approximates a constant in the range of Nprop=1×10-8-1×10-1. However, when tD=0.01, Nprop is in the range of 1×10-8-1×10-7. Besides, both CfD,opt and t Ix,opt increases with Ix. Once Ix is fixed at unity, CfD,opt would show a linear relation with Nprop. Fig. 9b shows that for a given Nprop, CfD,opt decreases with time and approaches a constant value. The constant value of CfD,lim is positively correlated with Nprop [e.g., CfD,opt=1.62 for Nprop=1×10-2, while CfD,opt=175 for Nprop=1×103]. Put it in another way, when dimensionless fixed period of time is shorter, the optimum design indicates a fracture with shorter length and higher conductivity; when dimensionless fixed period of time is longer, the opposite is the case. It is worth noting that the characteristic value of CfD,opt is 1.62 in the case of small Nprop, which is consistent with the results of Valko and Economides[27], proving the method presented in this paper is reliable. ...
Unified fracture design for very low permeability reservoirs
1
2012
... At a given mass of proppant, the fracture length and fracture width are competing for the proppant. The maximum productivity index would be achieved on the best compromise between length and conductivity. The classical proppant index method theory is originally proposed for single fracture with uniform conductivity in the pseudo-steady state (PSS) flow conditions[27,28], and the objective function is the productivity index in the PSS condition, while not (cumulative) rate in transient conditions. ...






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}